
Med bara några små tryckta delar, några 15x15 MakerBeam XL-profiler, kan du konvertera ett billigt chassi till en modulär ROS-driven rover. Med 15x15-profilerna kan du skjuta in 3 mm sexkantsmuttrar var du vill fästa en sensor.

En hallon-pi-kontrollerad rover med Seeed Studio Grove-sensorer. Den modulära designen har monteringspunkter för sensorer från märket Grove som GPS, ekolod, motorstyrning och Grove Servo för kameratiltning. Fjäderbrädor stöds också.

Delar för att skapa en Jetson Nano-rover för användning med Jetbot-programvara eller ROS. Adafruit FeatherWing är vårt rekommenderade motorstyrkort. Kamerahållaren fungerar för Rpi-kameraversion 1 eller 2.
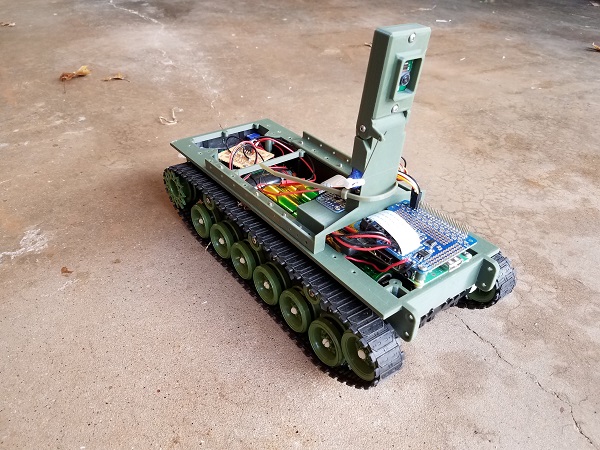
En wifi-kontrollerad rover byggd på ett SN400-tankchassi, ROS-kontrollerat med en Jetson Nano eller Raspberry Pi. Den modulära designen har monteringspunkter för sensorer från märket Grove som GPS, ekolod, motorstyrning och Grove Servo för kameratiltning. Fjäderbrädor stöds också.
Ett telefonfodral med flera ändamål för en Samsung S9 +, som kan anslutas till drone-radioer, fungera som skrivbordsstativ och har en solskydd eller skyddsskydd. Allt viks upp eller bryts ner för att passa i fickan. Detta klarar inte den vanliga S9
Ett telefonfodral med flera ändamål för en Samsung S9, som kan anslutas till drone-radioer, fungera som skrivbordsstativ och har en solskydd eller skyddsskydd. Allt viks upp eller bryts ner för att passa i fickan. Detta klarar inte S9 +.
Ett telefonfodral med flera ändamål för en Samsung S8, som kan anslutas till drone-radioer, fungera som skrivbordsstativ och har en solskydd eller skyddsskydd. Allt viks upp eller bryts ner för att passa i fickan.
Ett telefonfodral med flera ändamål för en Samsung S7, som kan anslutas till drone-radioer, fungera som skrivbordsstativ och har en solskydd eller skyddsskydd. Allt viks upp eller bryts ner för att passa i fickan.

Ett modulärt Rpi-fall med stabilt kattsystem

En djurkamera byggd med vårt staplade katter Rpi-system.
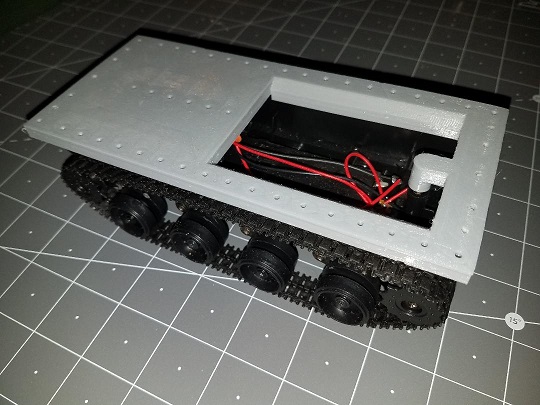
Med tillägg av ett platt däck blir en gemensam 1/12: e tankskal chassi en snabb robotplattform

Detta skapades eftersom DJI-radion klämmer fast på min Samsung-telefon där huvudfunktionsknappen är placerad. Genom att lägga till den nya basen för klämning i min radio fick jag luta på telefonskärmen och lägga till en solskugga eller huva. Visiret vika inte upp som den nyare modellen.