Véhicule télécommandé Cattern v1
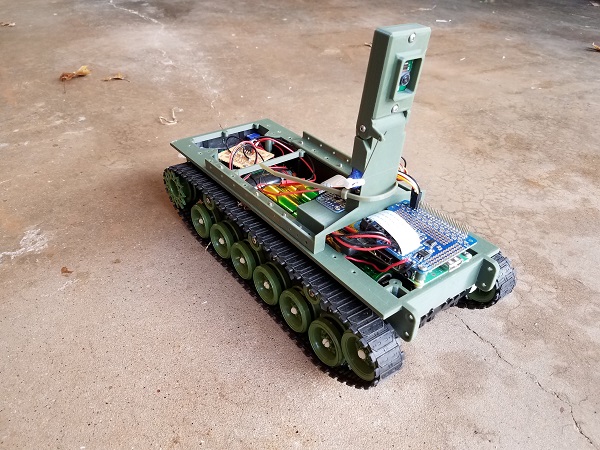
Un véhicule télécommandé wifi construit sur un châssis de char SN400, ROS contrôlé avec un Jetson Nano ou un Raspberry Pi. La conception modulaire comporte des points de montage pour les capteurs de la marque Grove tels que le GPS, le sonar, le contrôle du moteur et le servo Grove pour l'inclinaison de la caméra. Les planches à plumes sont également compatibles.
Images
projects.cr1_1
projects.cr1_2
projects.cr1_3
projects.cr1_4
Connectez-vous pour télécharger les fichiers STL
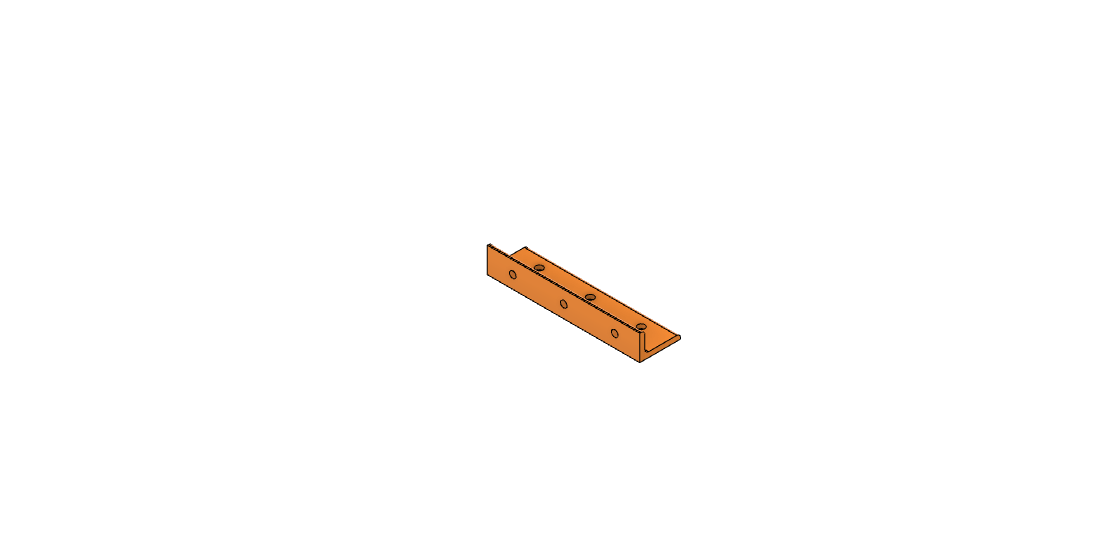
angle de montage de la coque 60 mm
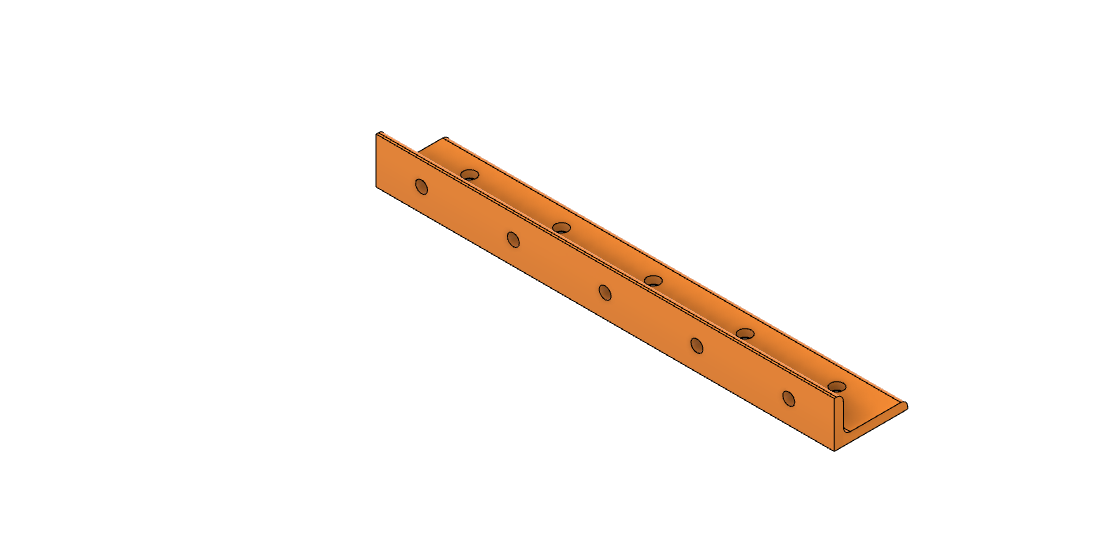
angle de montage de la coque 100 mm
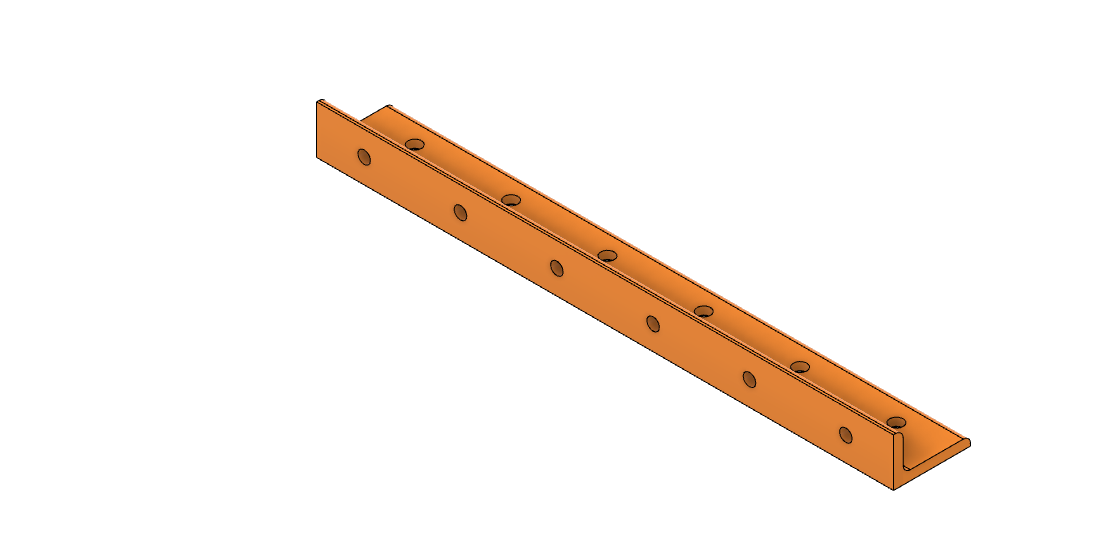
angle de montage de la coque 120 mm
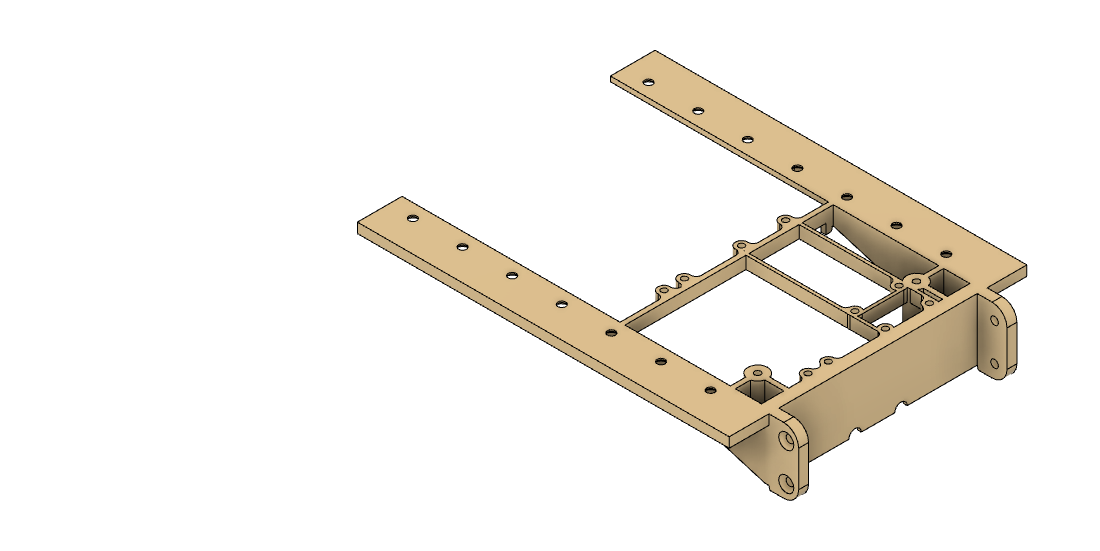
Châssis avec cavité de batterie
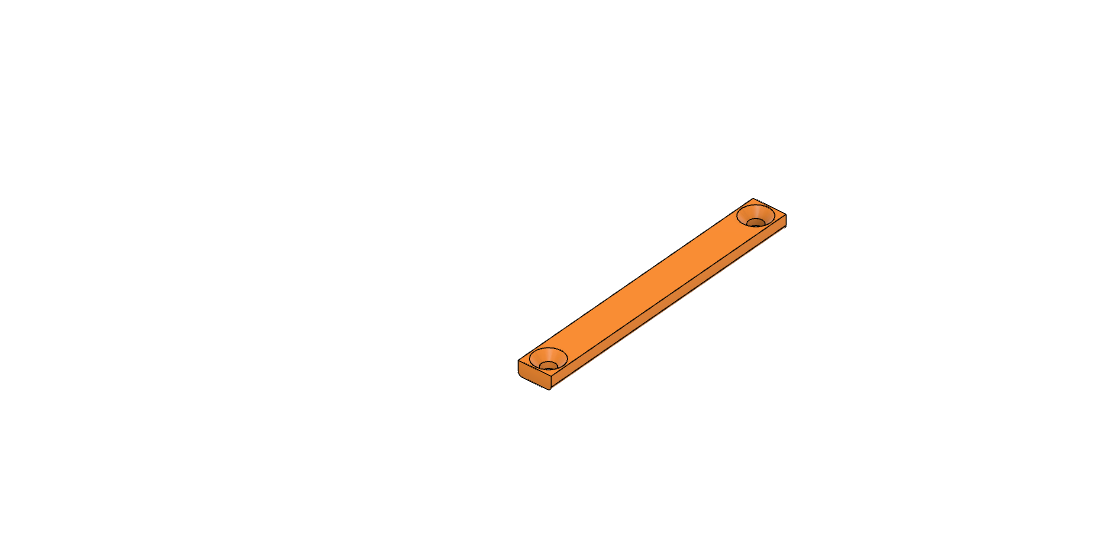
Barre de suspension de batterie
Support de batterie / barre coulissante
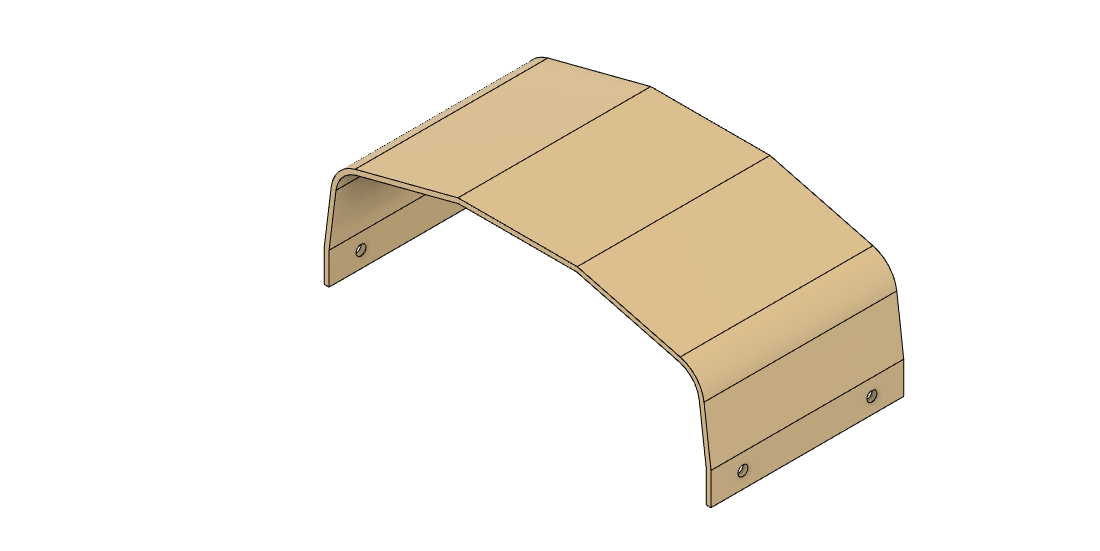
coque droite x 60 mm
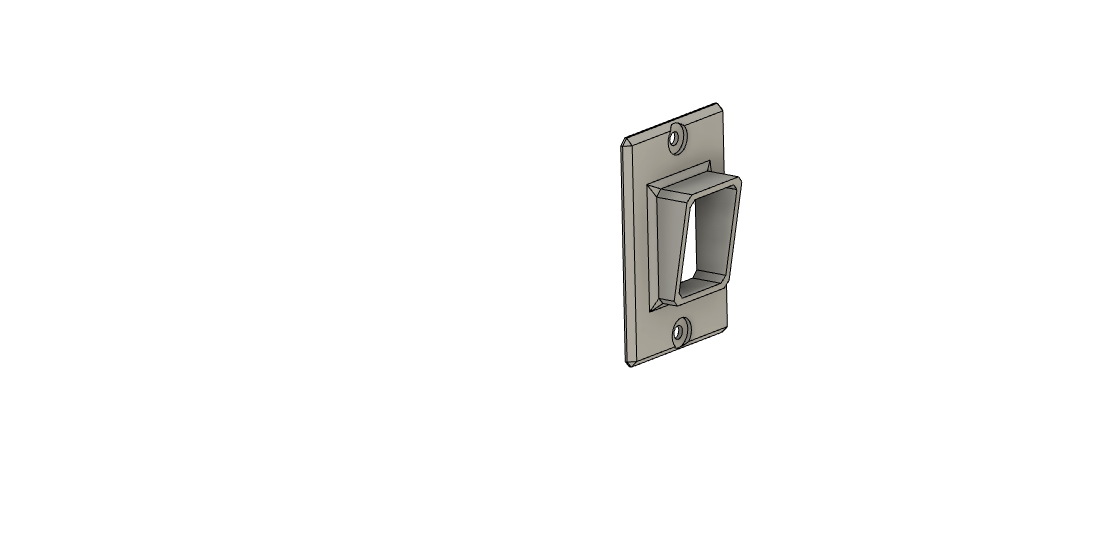
Face et capot de la caméra
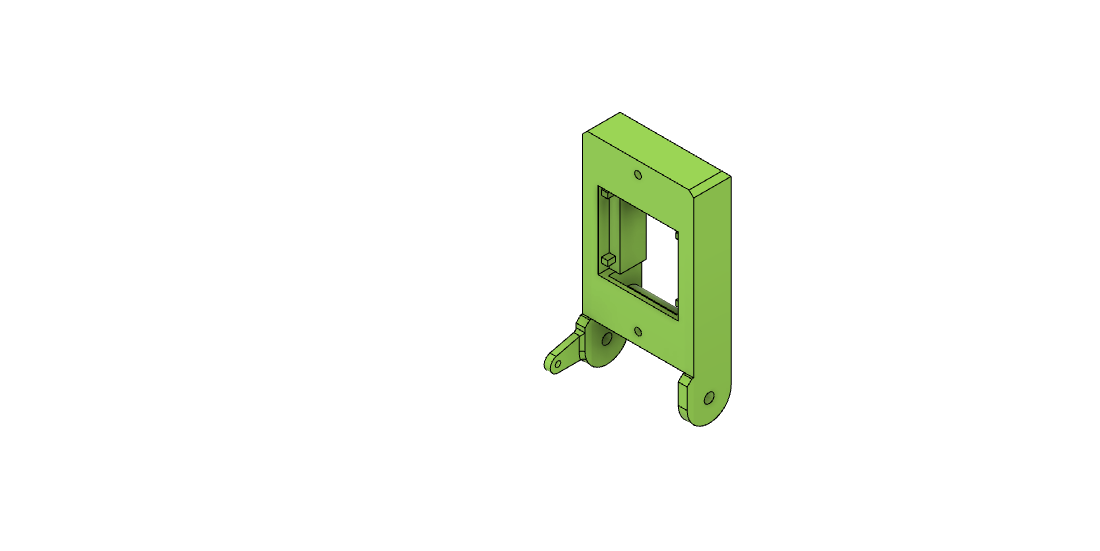
Rpi Camera Cadre
Fin support de carénage x 70mm
Fin support de carénage x 90mm

Plate-forme pour FeatherWing
Cadre pour l'extrémité du moteur
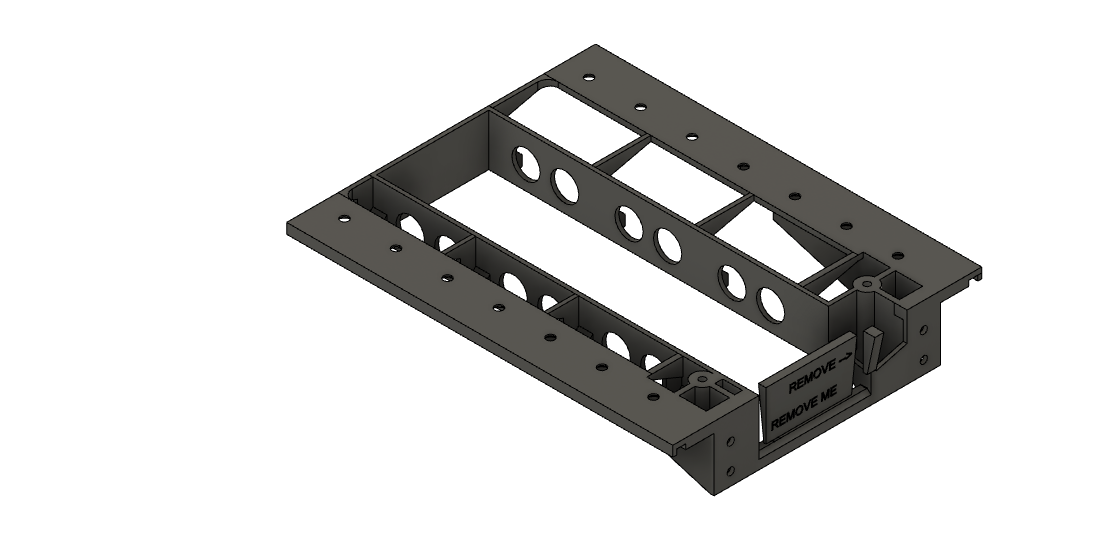
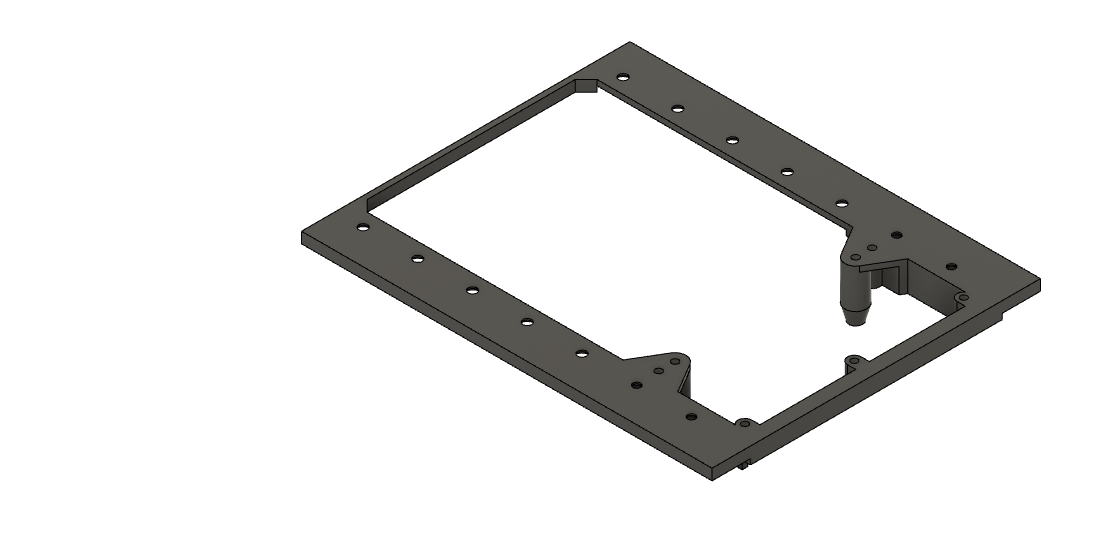
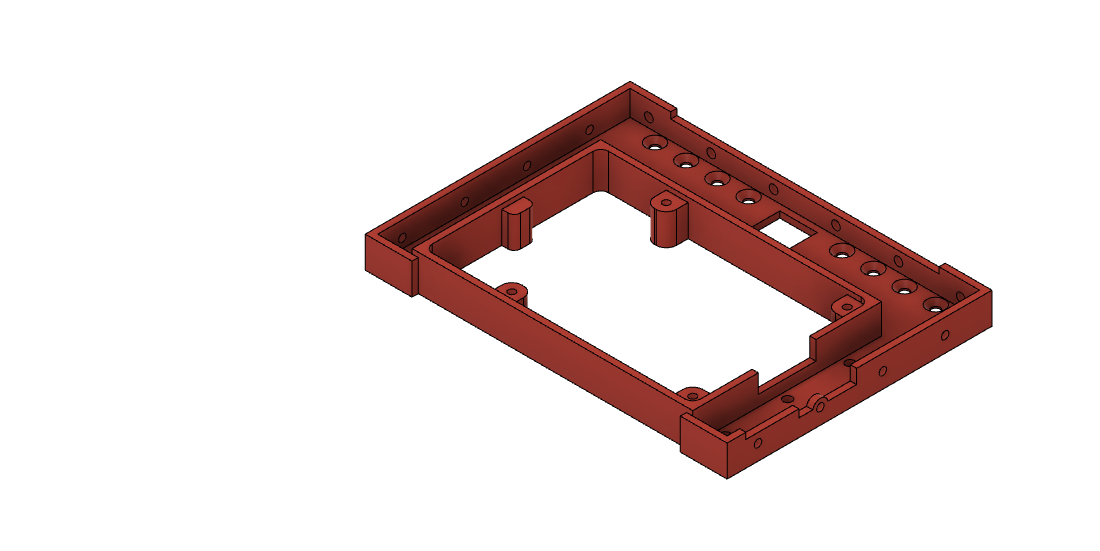
Cadre avec trous universels pour plusieurs ordinateurs
Module Raspberry Pi A + et B +
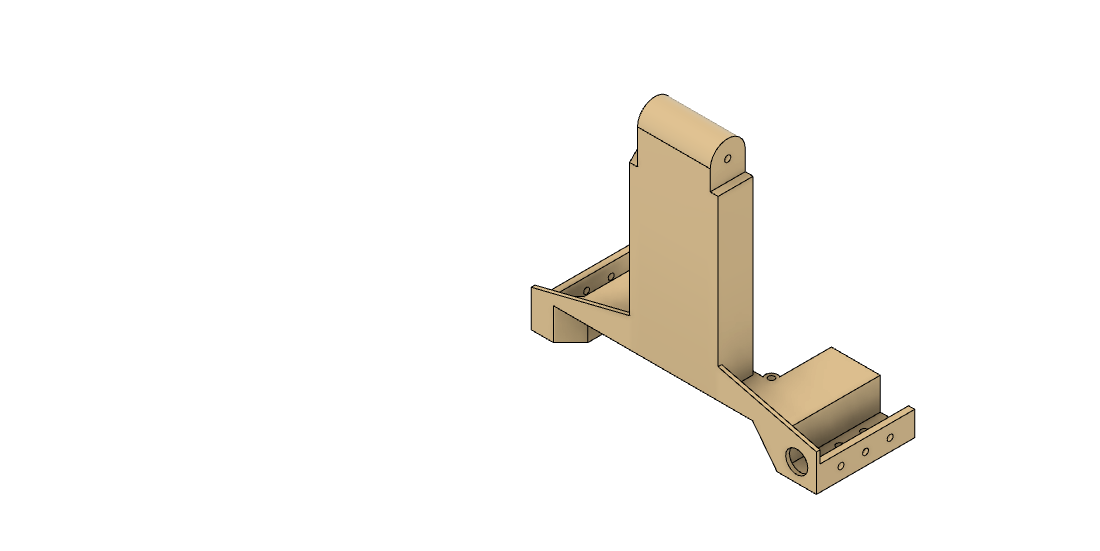
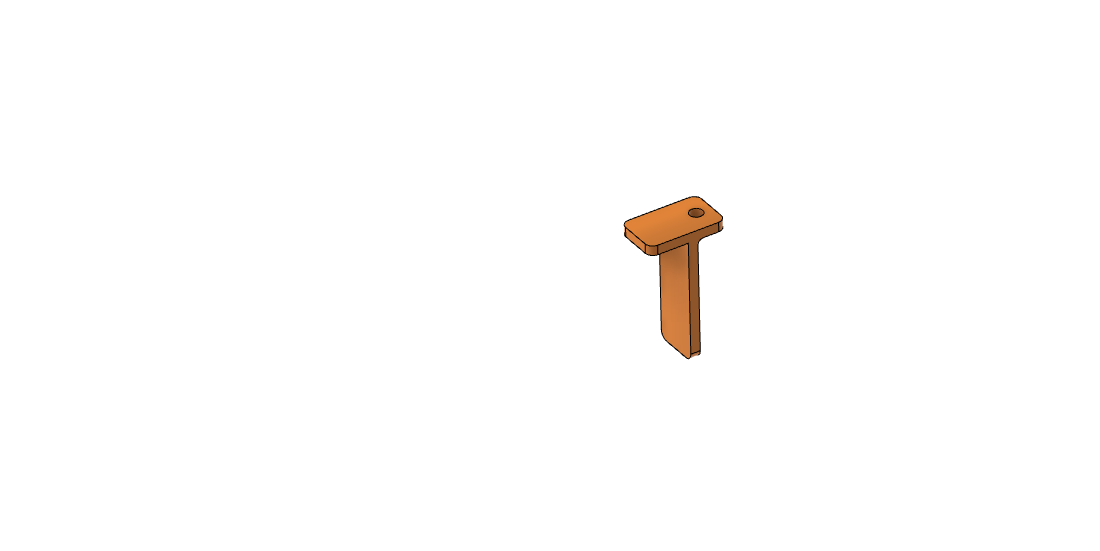
Cou de caméra avec servo S90
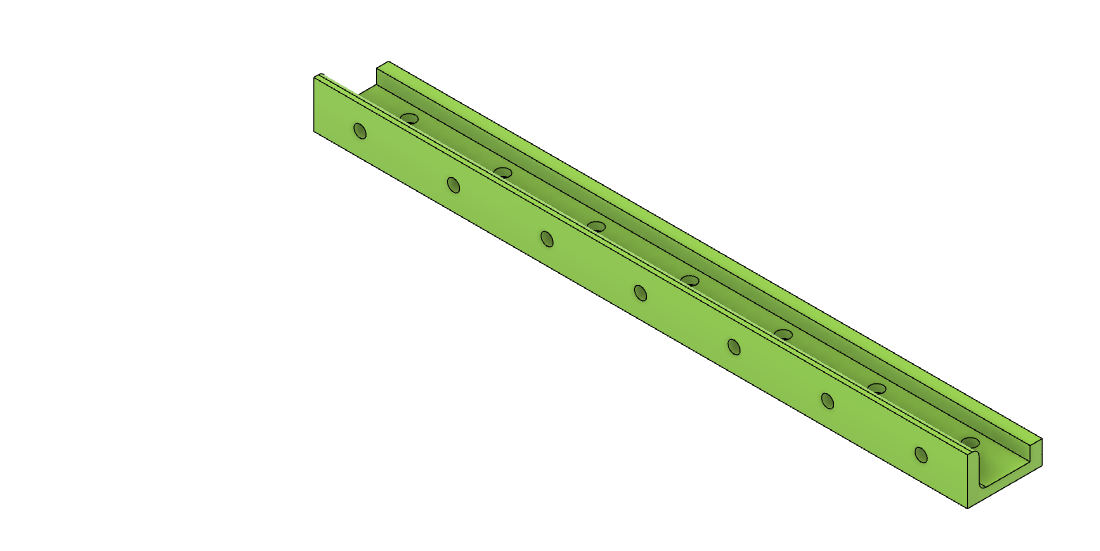
Canal d'épissage de cadre
angle de montage de la coque 60 mm
angle de montage de la coque 100 mm
angle de montage de la coque 120 mm
Châssis avec cavité de batterie
Barre de suspension de batterie
Support de batterie / barre coulissante
coque droite x 60 mm
Face et capot de la caméra
Rpi Camera Cadre
Fin support de carénage x 70mm
Fin support de carénage x 90mm
Plate-forme pour FeatherWing
Cadre pour l'extrémité du moteur
Cadre avec trous universels pour plusieurs ordinateurs
Module Raspberry Pi A + et B +
Cou de caméra avec servo S90
Canal d'épissage de cadre
Pièces à acheter
- Chassis to Frame Screws ( #4-20 x 1" Rolling Screw for Plastic )
- Frame to Module Screws ( M3-0.50 x 6MM Flat Head Socket Cap Screw )
- SBC Screws ( M2.5x6mm Thread Button Head )
- Body Screws ( #3-24 x 1/4" Rolling Thread Screw for Plastic )
- XT60 Power Inlet
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Banggood