Cattern Rover v1 básica
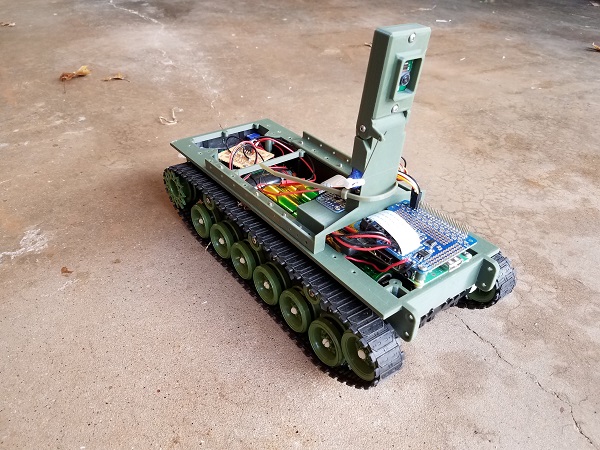
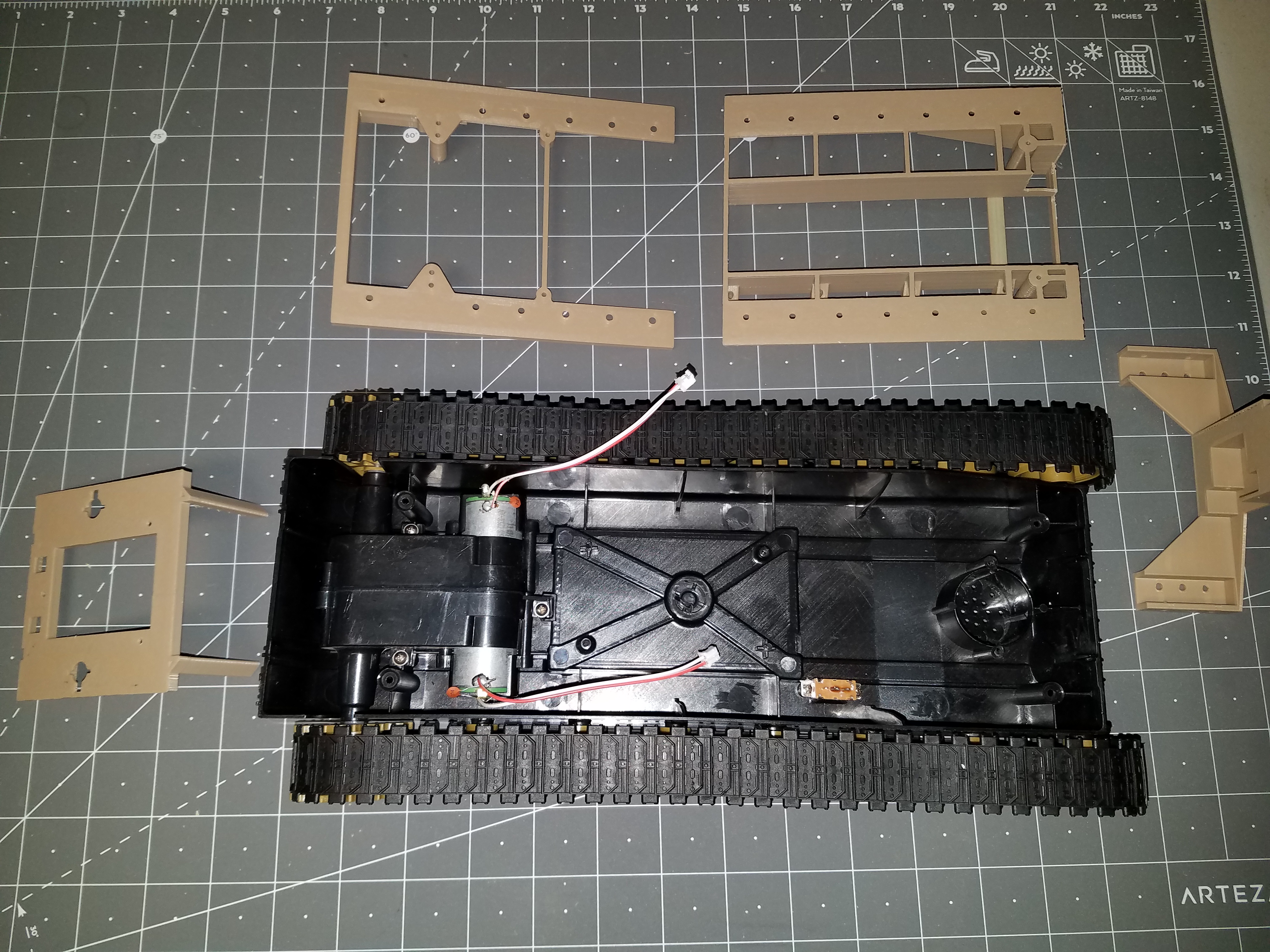
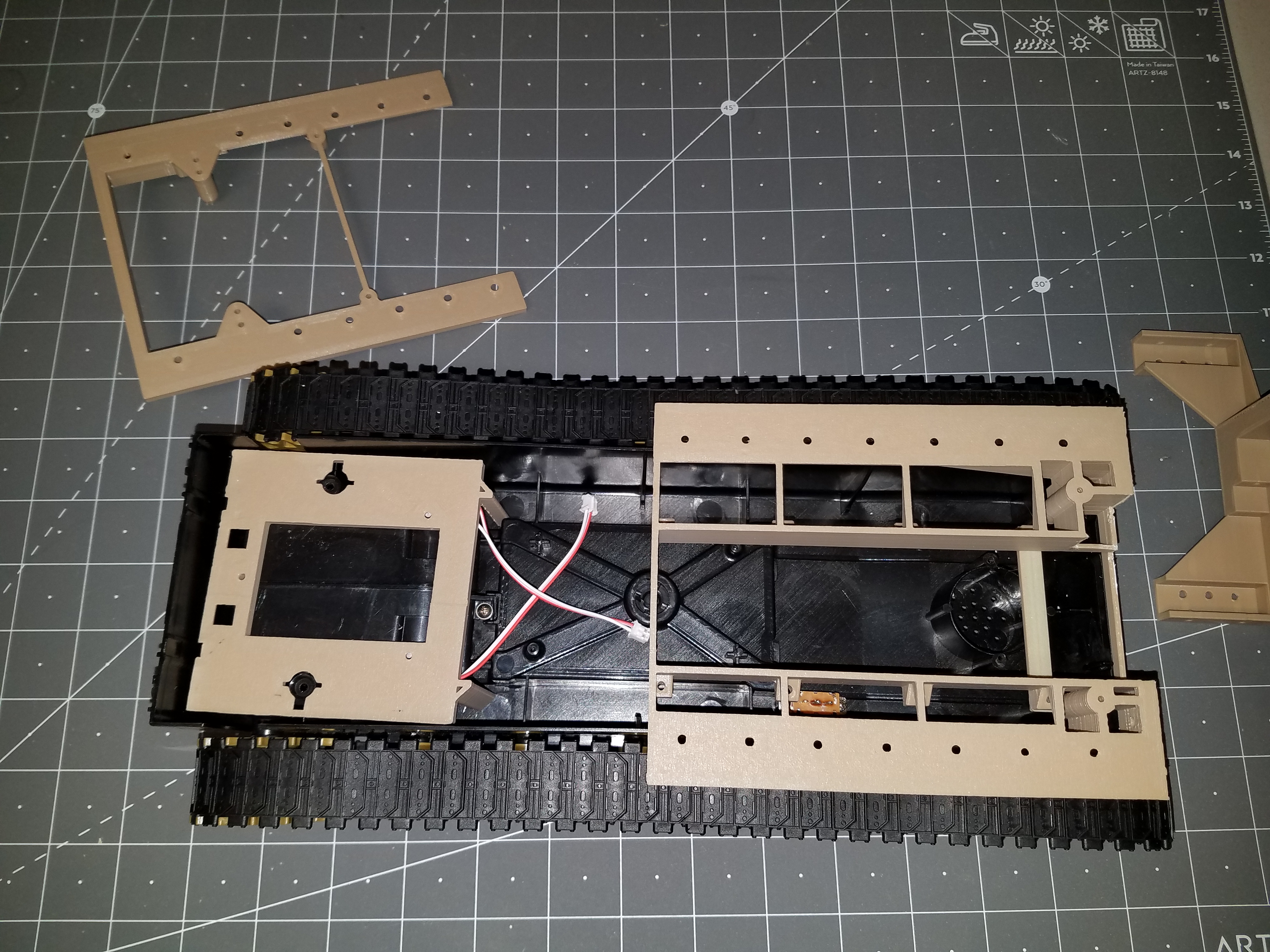
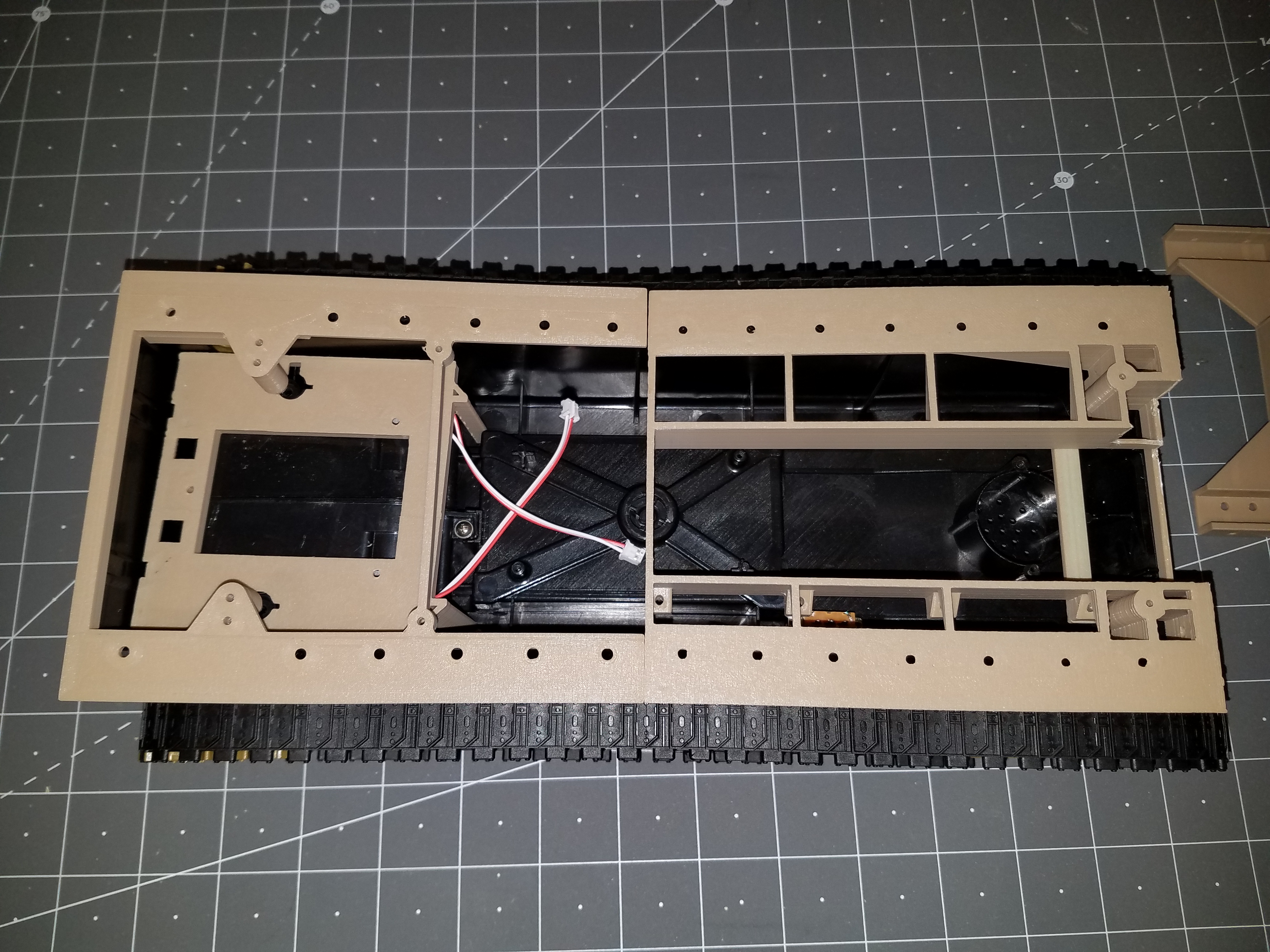
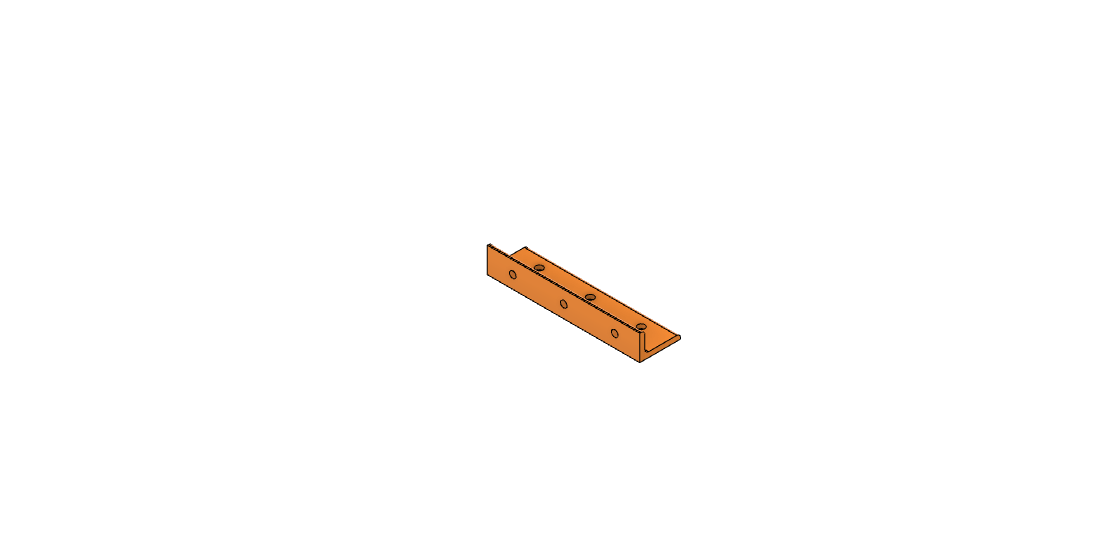
Un rover controlado por wifi construido sobre un chasis de tanque SN400, ROS controlado con un Jetson Nano o Raspberry Pi. El diseño modular tiene puntos de montaje para sensores de la marca Grove como GPS, Sonar, Control de motor y Grove Servo para la inclinación de la cámara. También se admiten tablas de plumas.
Images
projects.cr1_1
projects.cr1_2
projects.cr1_3
projects.cr1_4
Inicie sesión para descargar archivos STL
Perimeter Angle 60mm
Perimeter Angle 100mm
Perimeter Angle 120mm
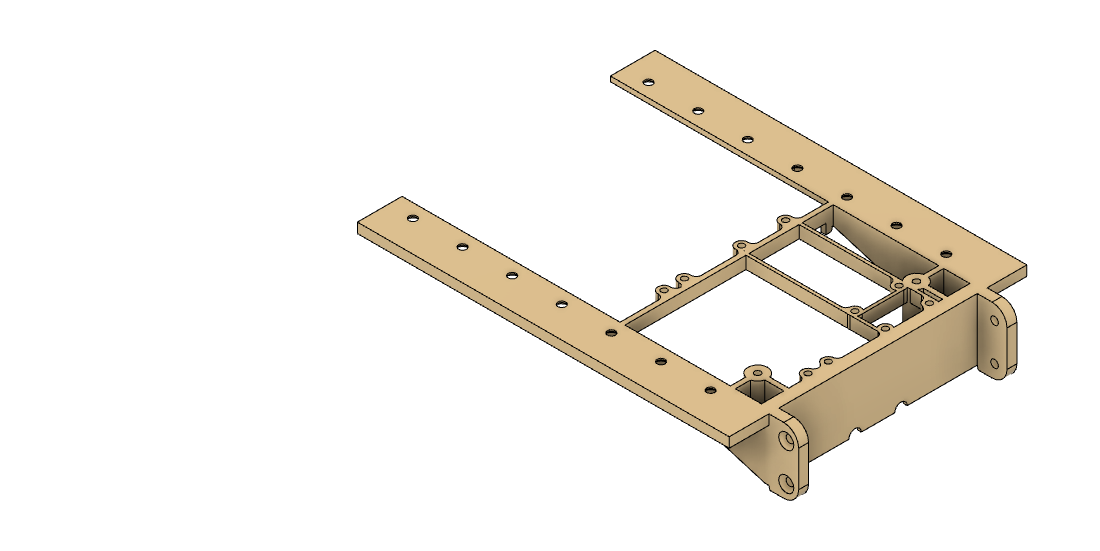
Frame with battery cavity
Battery Hanger Bar
Battery Keeper / Sliding Bar
Body Plain x 60mm
Camera Face And Hood
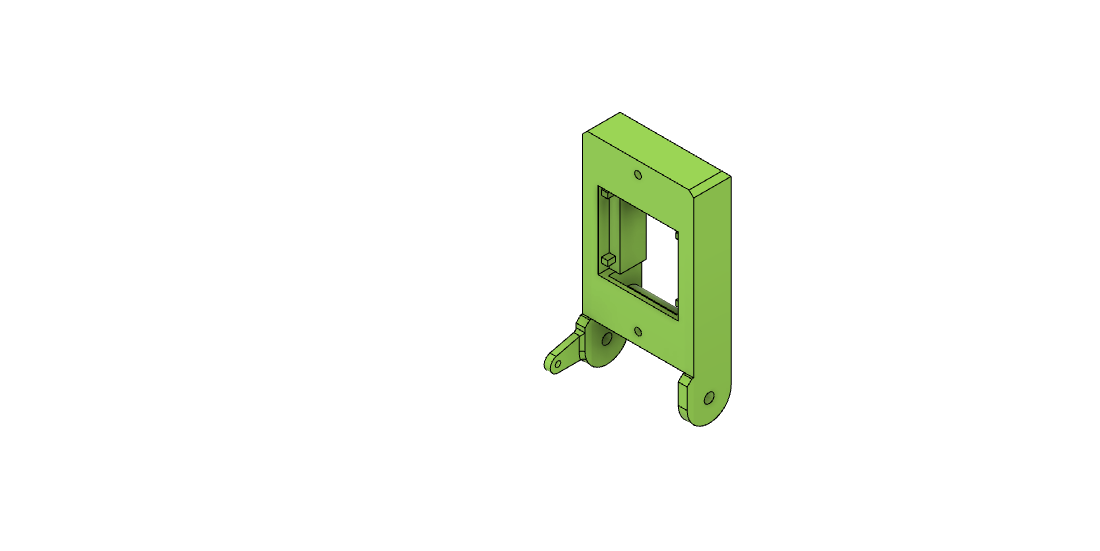
Rpi Camera Holder
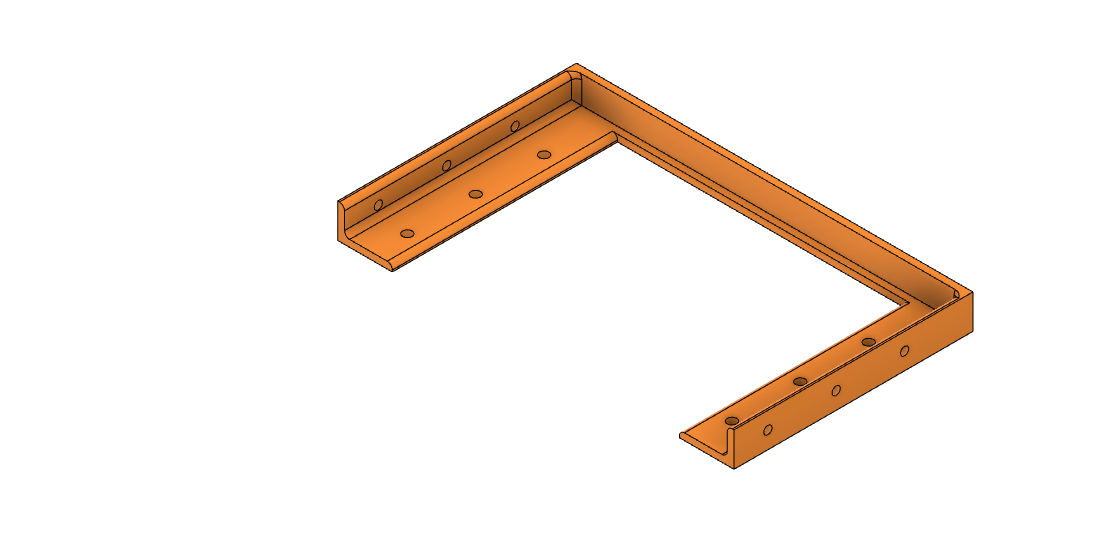
End Angle x 70mm
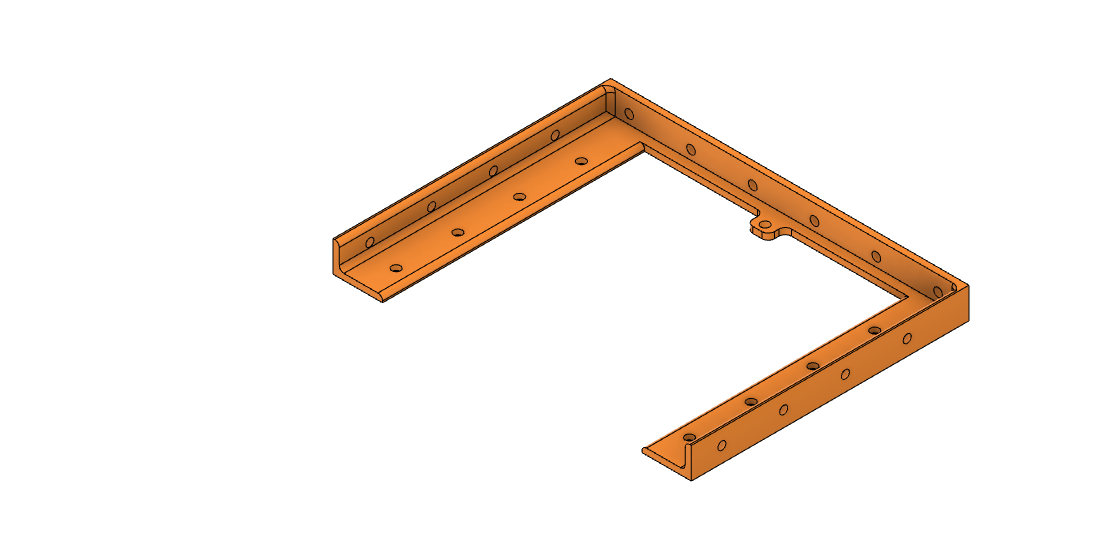
End Angle X 90mm

Motor Area Platform For Feather
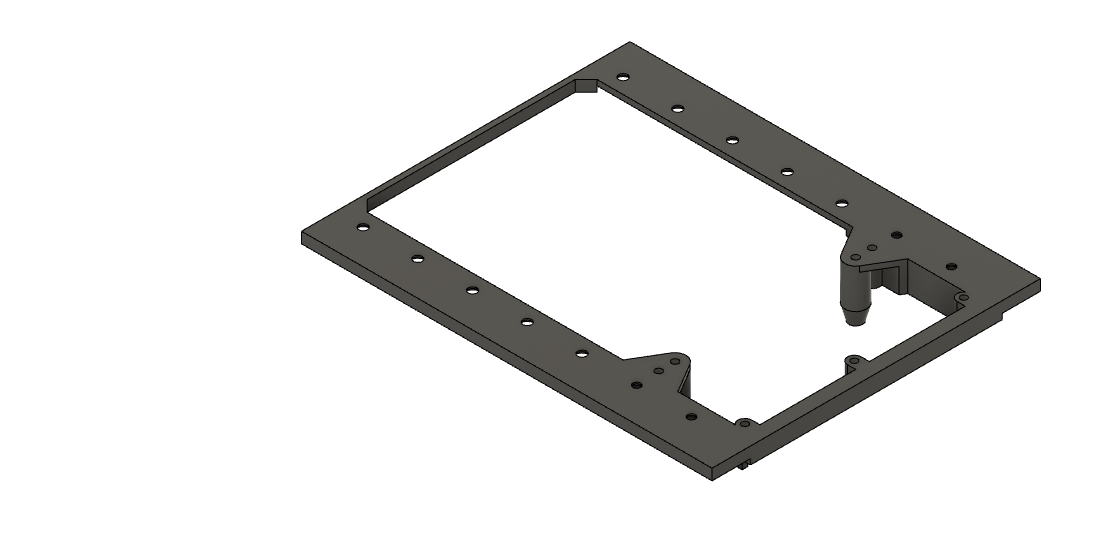
Frame For Motor End
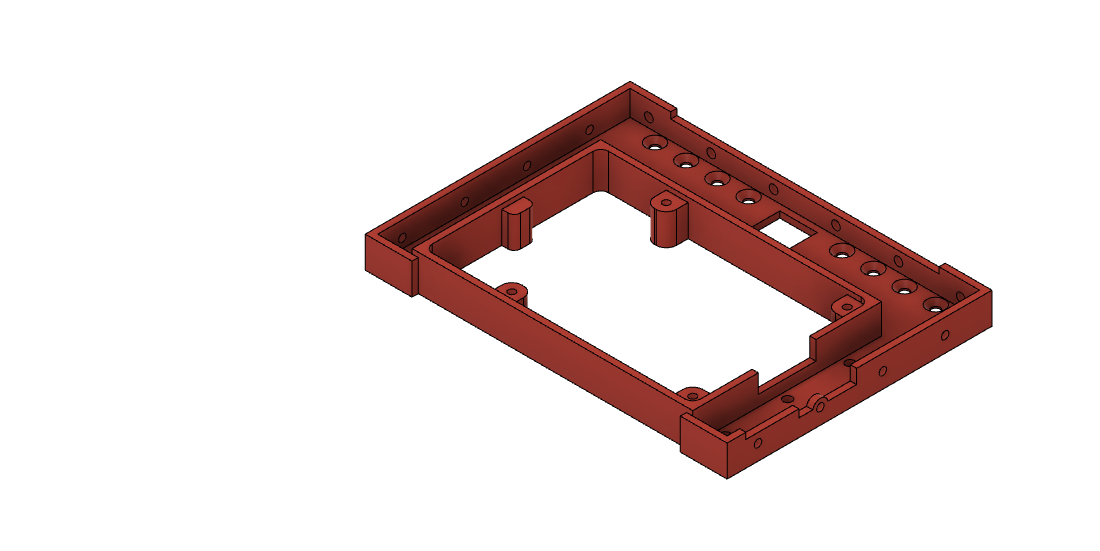
Frame With Universal SBC Holes
Raspberry Pi Module A+ and B+
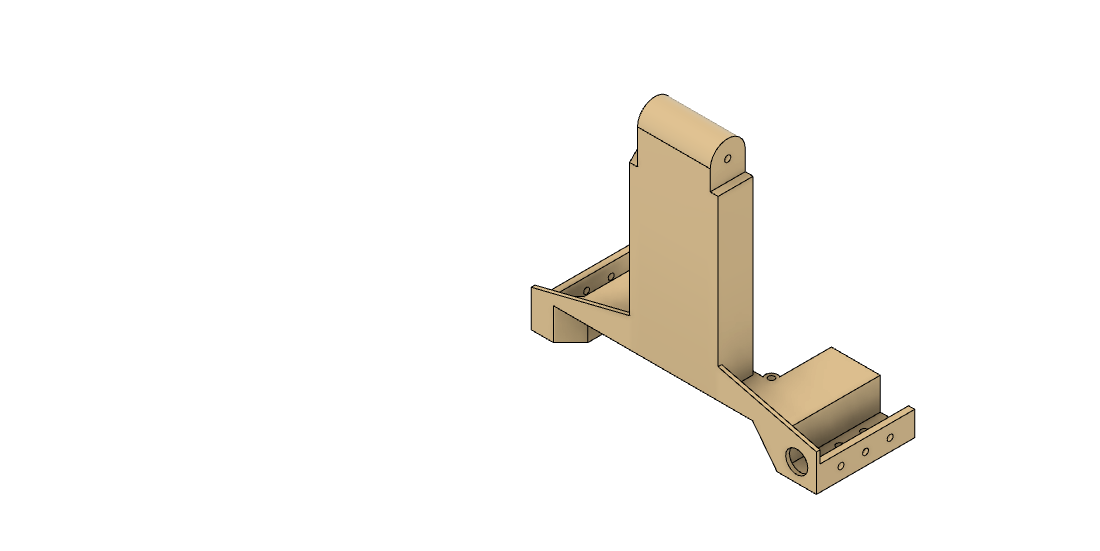
Camera Neck With S90 Servo
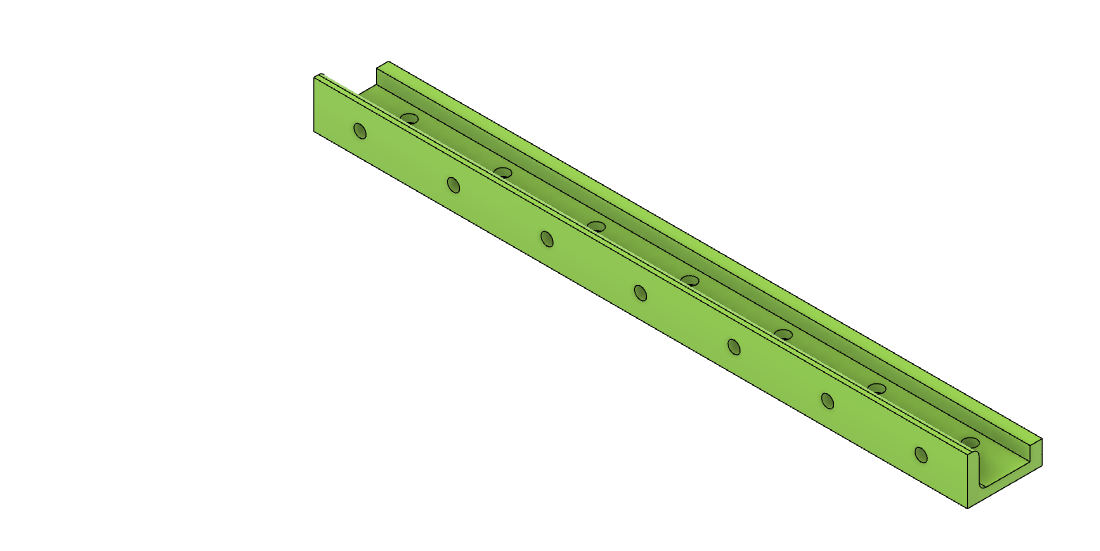
Frame Splicing Channel
Perimeter Angle 60mm
Perimeter Angle 100mm
Perimeter Angle 120mm
Frame with battery cavity
Battery Hanger Bar
Battery Keeper / Sliding Bar
Body Plain x 60mm
Camera Face And Hood
Rpi Camera Holder
End Angle x 70mm
End Angle X 90mm
Motor Area Platform For Feather
Frame For Motor End
Frame With Universal SBC Holes
Raspberry Pi Module A+ and B+
Camera Neck With S90 Servo
Frame Splicing Channel
Partes para comprar
- Chassis to Frame Screws ( #4-20 x 1" Rolling Screw for Plastic )
- Frame to Module Screws ( M3-0.50 x 6MM Flat Head Socket Cap Screw )
- SBC Screws ( M2.5x6mm Thread Button Head )
- Body Screws ( #3-24 x 1/4" Rolling Thread Screw for Plastic )
- XT60 Power Inlet
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Banggood