Cattern Ferngesteuertes Fahrzeug v1
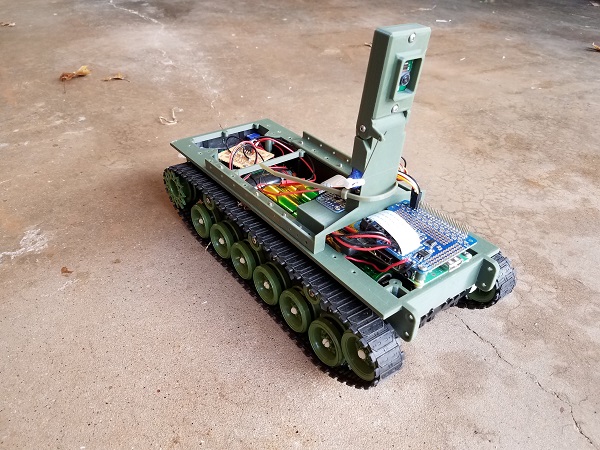
Ein wifi-gesteuerter Rover, der auf einem SN400-Tankchassis aufgebaut ist und von ROS mit einem Jetson Nano oder Raspberry Pi gesteuert wird. Das modulare Design verfügt über Befestigungspunkte für Sensoren der Marke Grove wie GPS, Sonar, Motor Control und Grove Servo zum Kippen der Kamera. FEATHER-Boards werden ebenfalls unterstützt.
Images
projects.cr1_1
projects.cr1_2
projects.cr1_3
projects.cr1_4
Anmelden, um STL-Dateien herunterzuladen
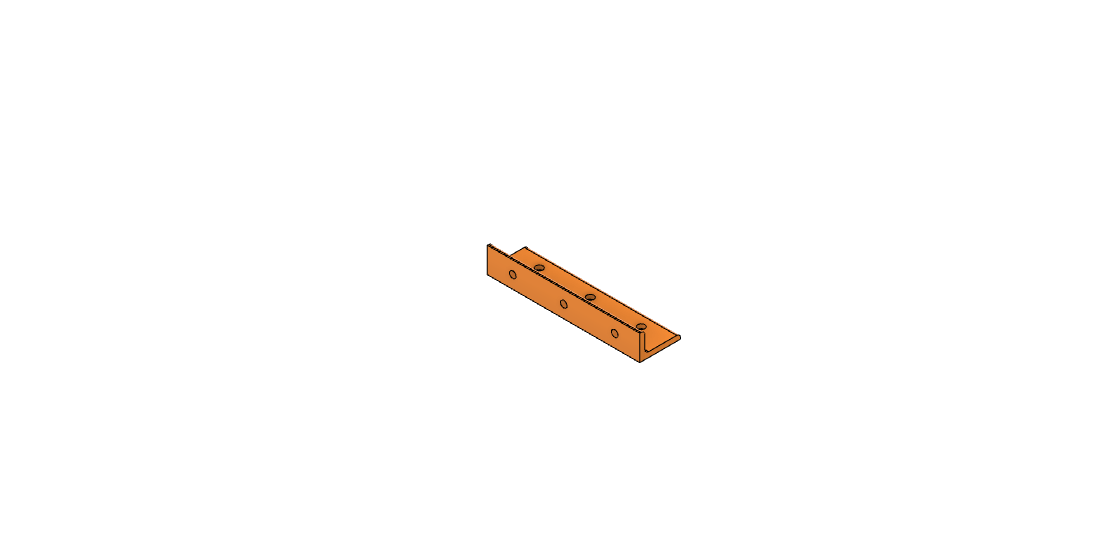
Perimeter Angle 60mm
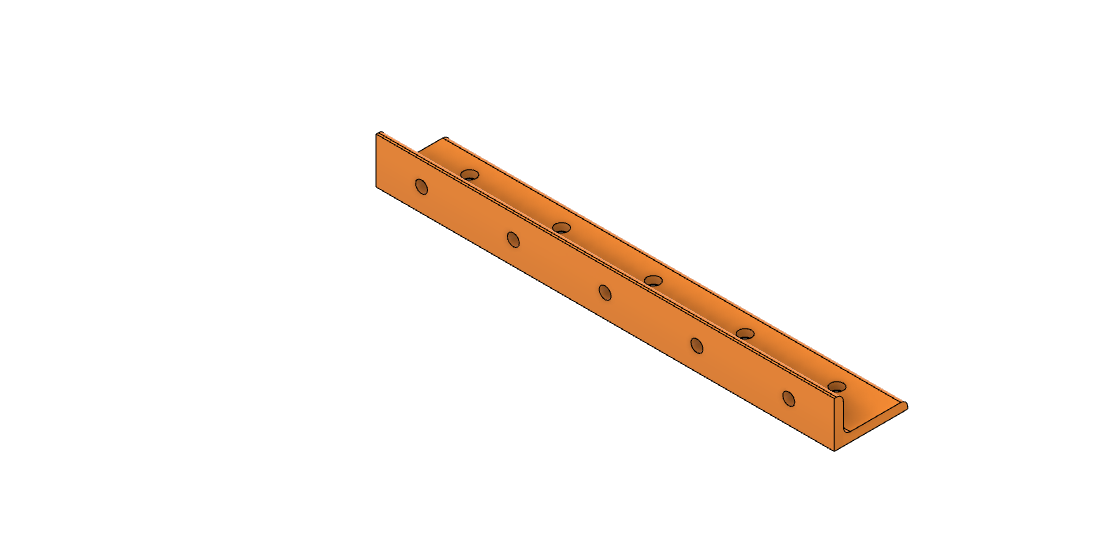
Perimeter Angle 100mm
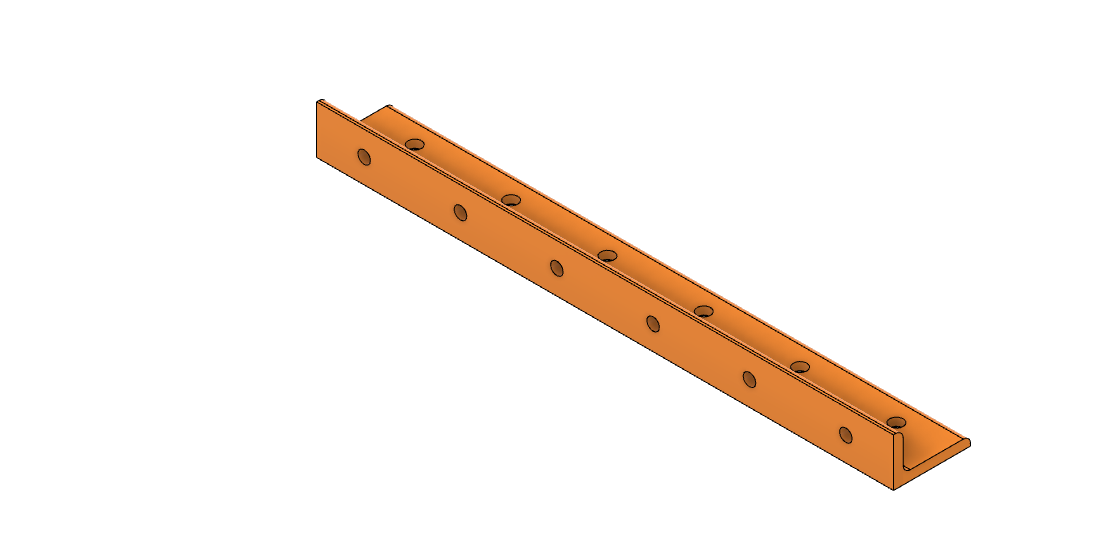
Perimeter Angle 120mm
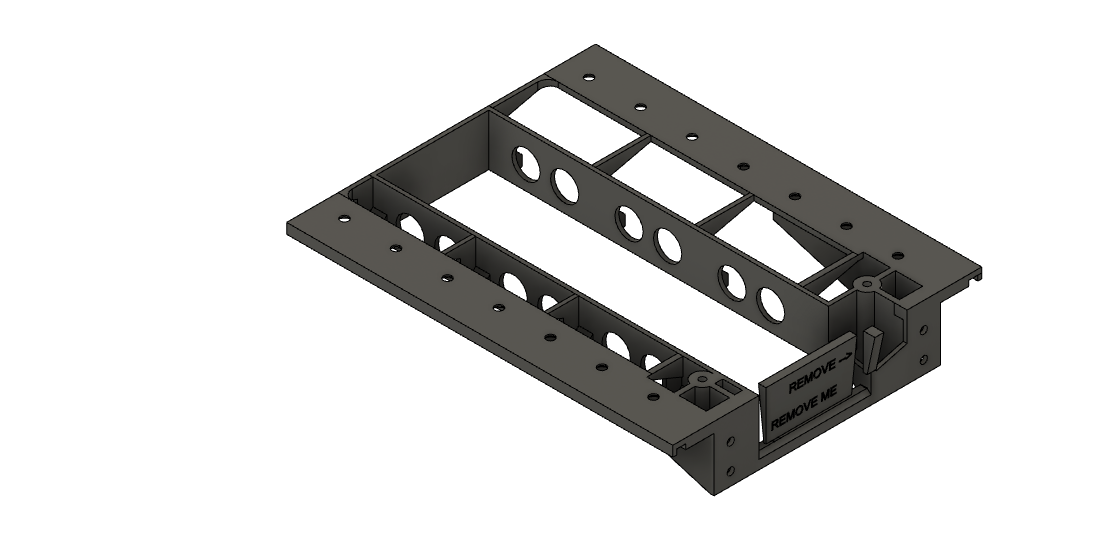
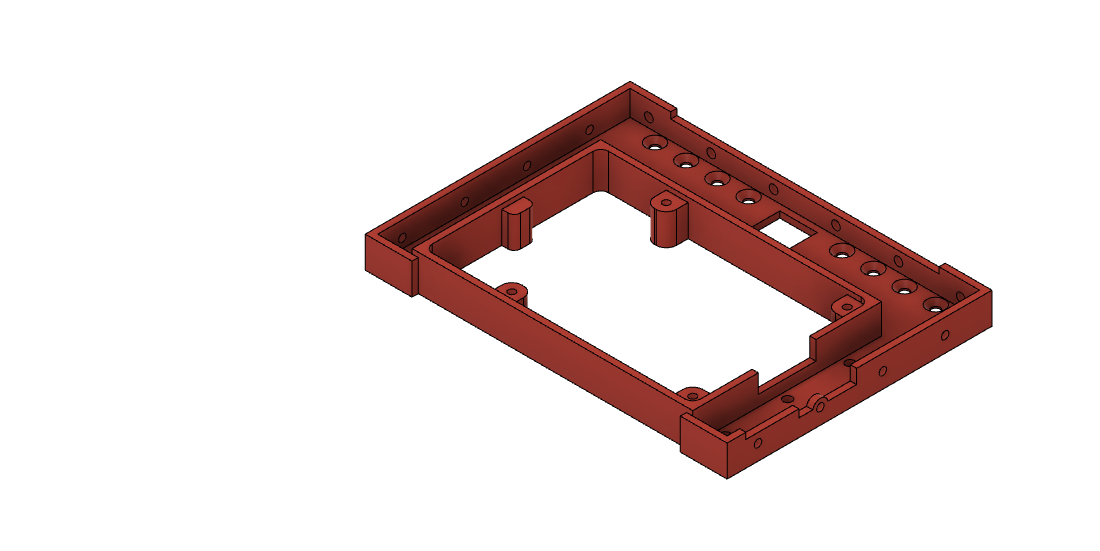
Frame with battery cavity
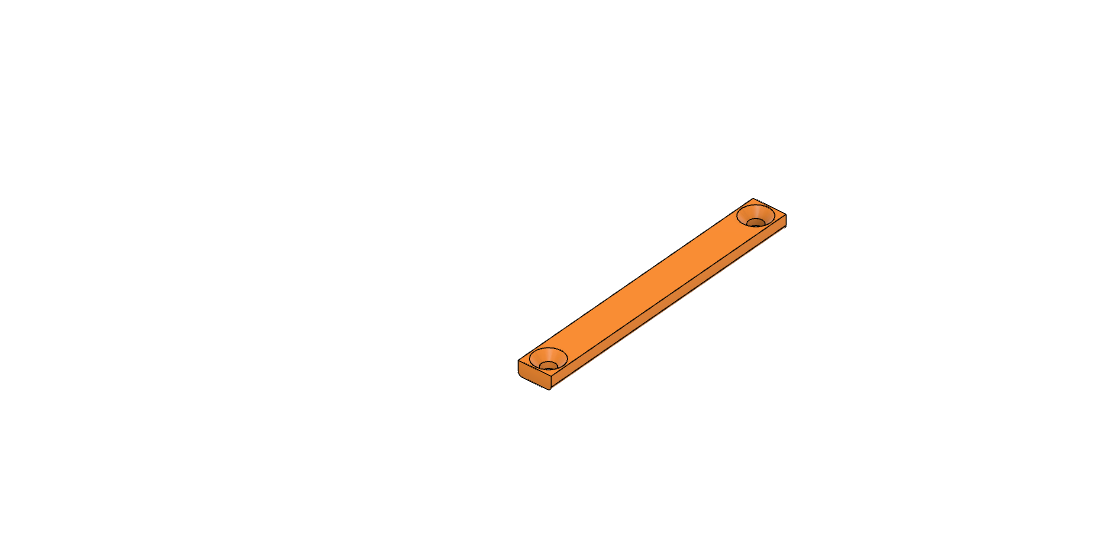
Battery Hanger Bar
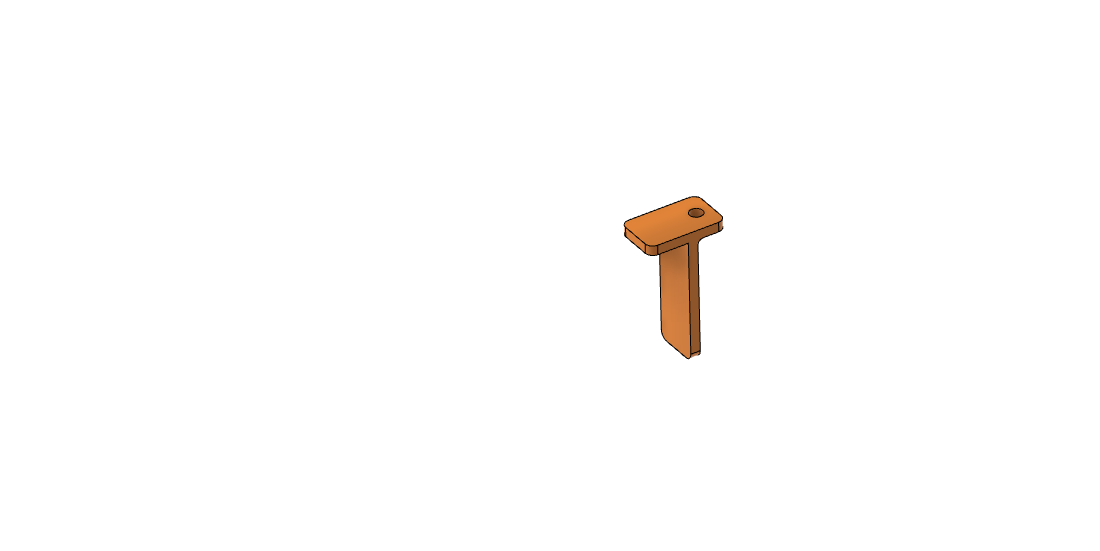
Battery Keeper / Sliding Bar
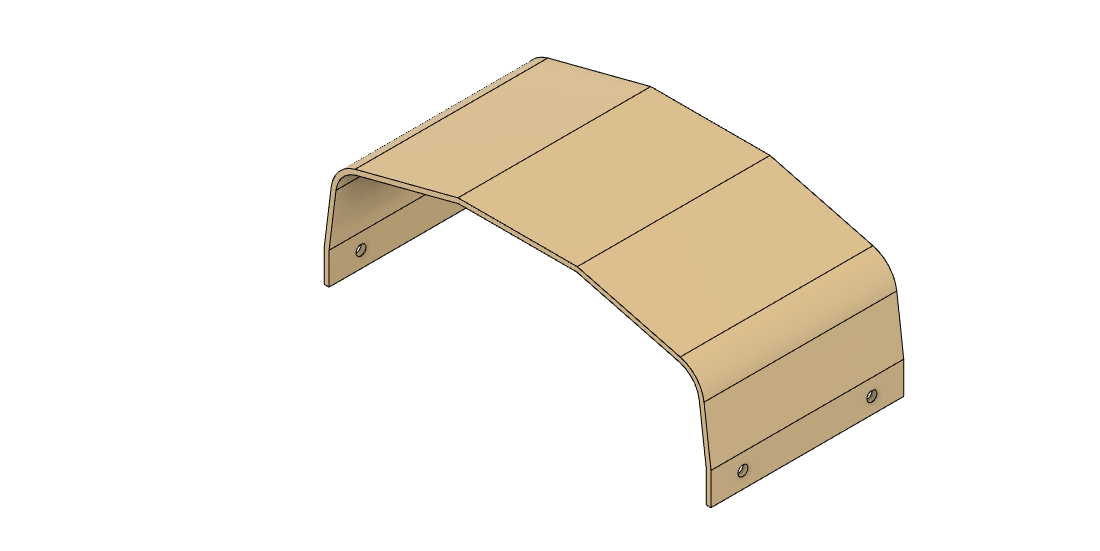
Body Plain x 60mm
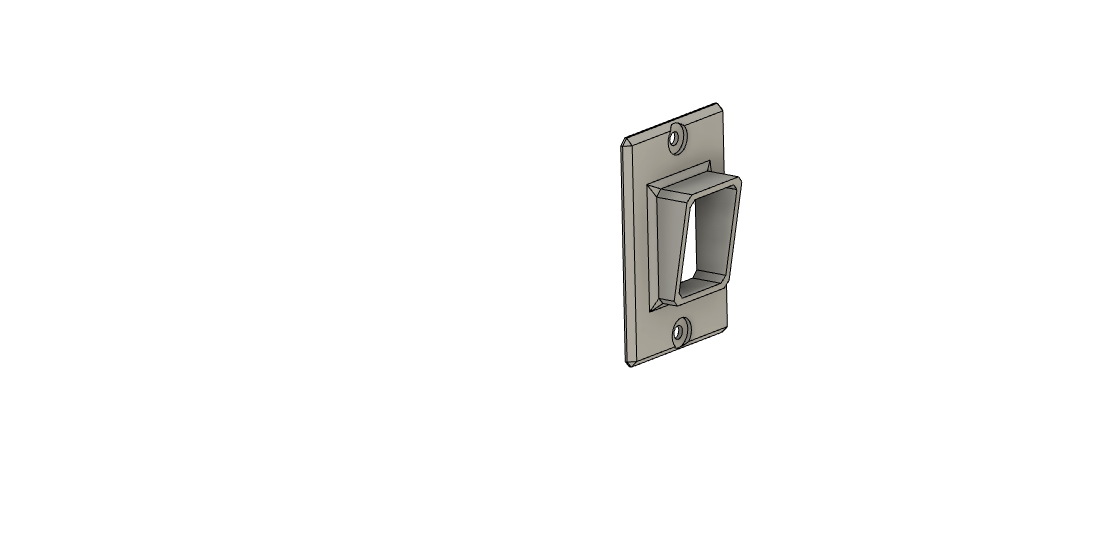
Camera Face And Hood
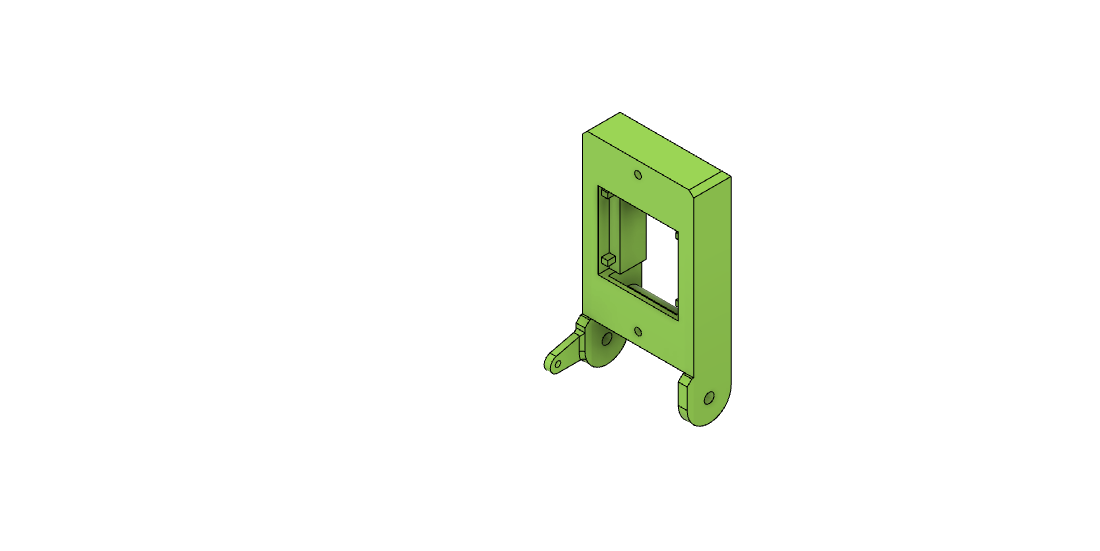
Rpi Camera Holder
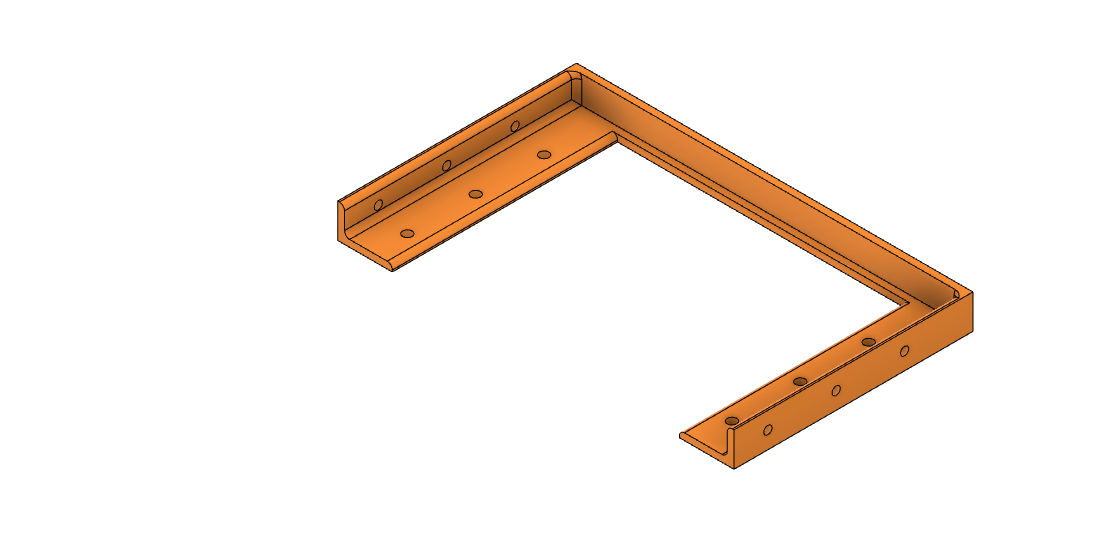
End Angle x 70mm
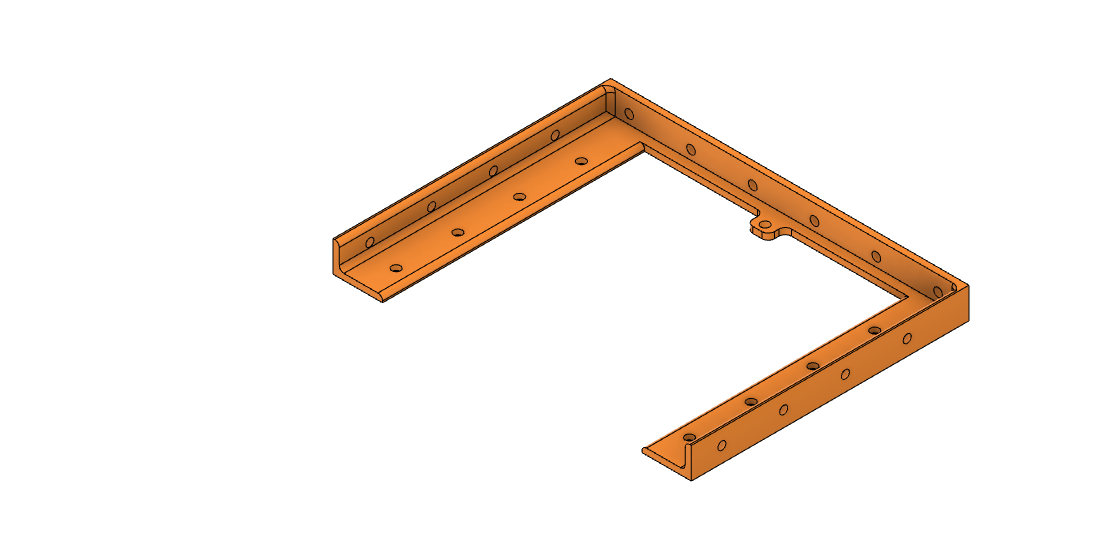
End Angle x 90mm

Motor Area Platform For Feather
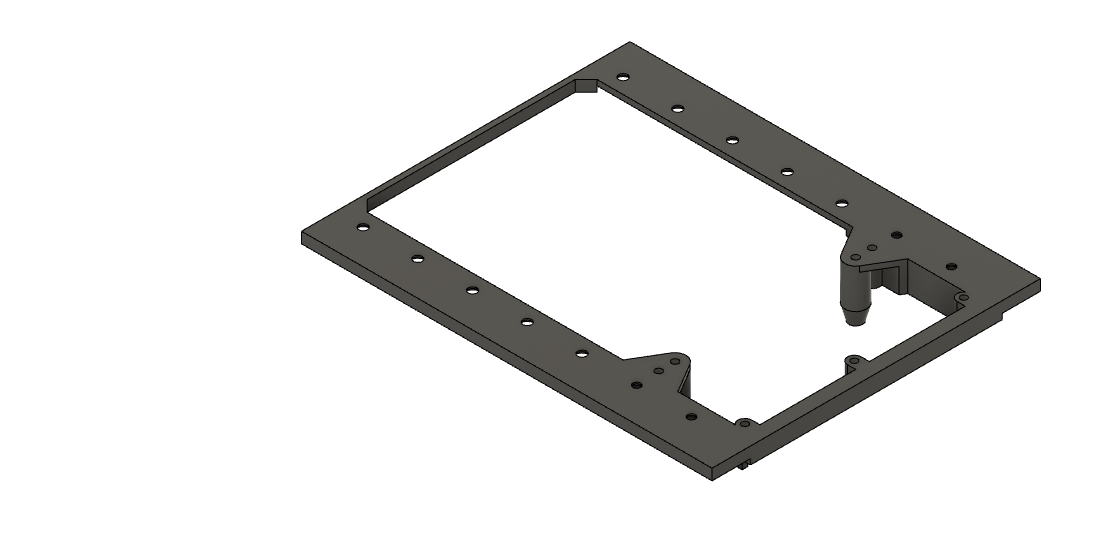
Frame For Motor End
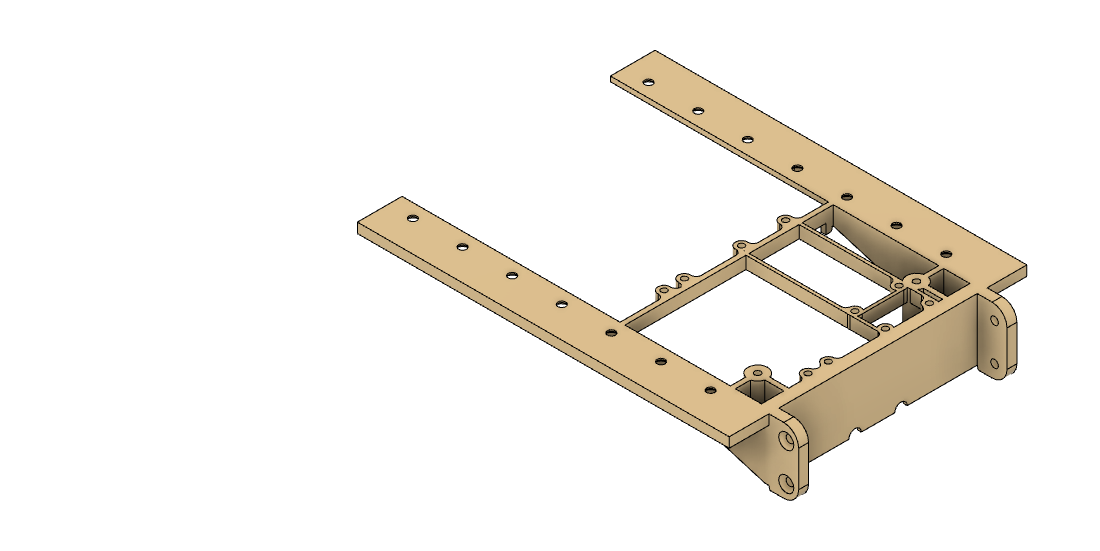
Frame With Universal SBC Holes
Raspberry Pi Module A+ and B+
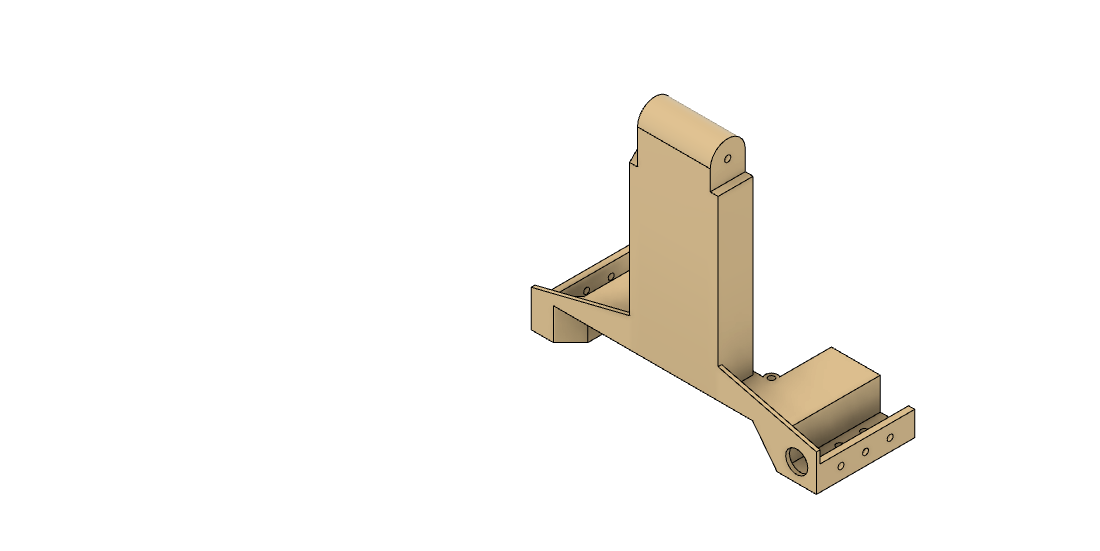
Camera Neck With S90 Servo
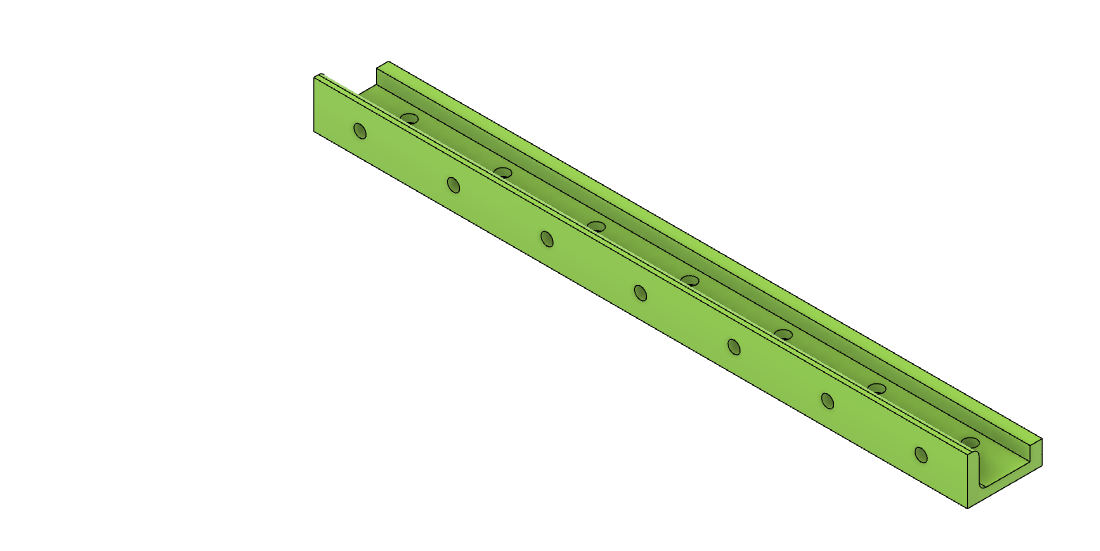
Frame Splicing Channel
Perimeter Angle 60mm
Perimeter Angle 100mm
Perimeter Angle 120mm
Frame with battery cavity
Battery Hanger Bar
Battery Keeper / Sliding Bar
Body Plain x 60mm
Camera Face And Hood
Rpi Camera Holder
End Angle x 70mm
End Angle x 90mm
Motor Area Platform For Feather
Frame For Motor End
Frame With Universal SBC Holes
Raspberry Pi Module A+ and B+
Camera Neck With S90 Servo
Frame Splicing Channel
Zu kaufende Teile
- Chassis to Frame Screws ( #4-20 x 1" Rolling Screw for Plastic )
- Frame to Module Screws ( M3-0.50 x 6MM Flat Head Socket Cap Screw )
- SBC Screws ( M2.5x6mm Thread Button Head )
- Body Screws ( #3-24 x 1/4" Rolling Thread Screw for Plastic )
- XT60 Power Inlet
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Banggood