Cattern Fjärrstyrt Fordon v1
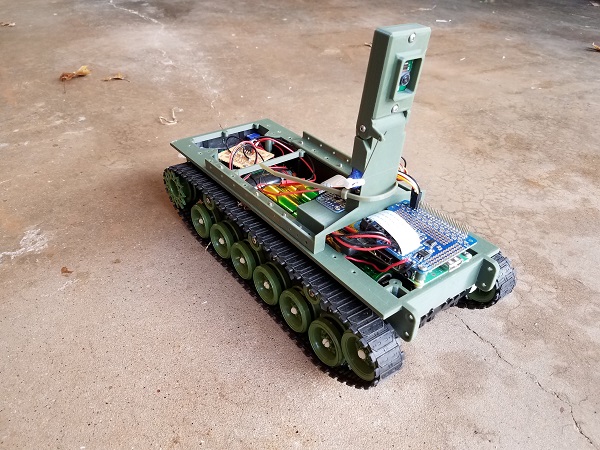
En wifi-kontrollerad rover byggd på ett SN400-tankchassi, ROS-kontrollerat med en Jetson Nano eller Raspberry Pi. Den modulära designen har monteringspunkter för sensorer från märket Grove som GPS, ekolod, motorstyrning och Grove Servo för kameratiltning. Fjäderbrädor stöds också.
Images
projects.cr1_1
projects.cr1_2
projects.cr1_3
projects.cr1_4
Войдите, чтобы загрузить файлы STL
Угол установки кузова 60 мм
Угол установки кузова 100 мм
Угол установки кузова 120 мм
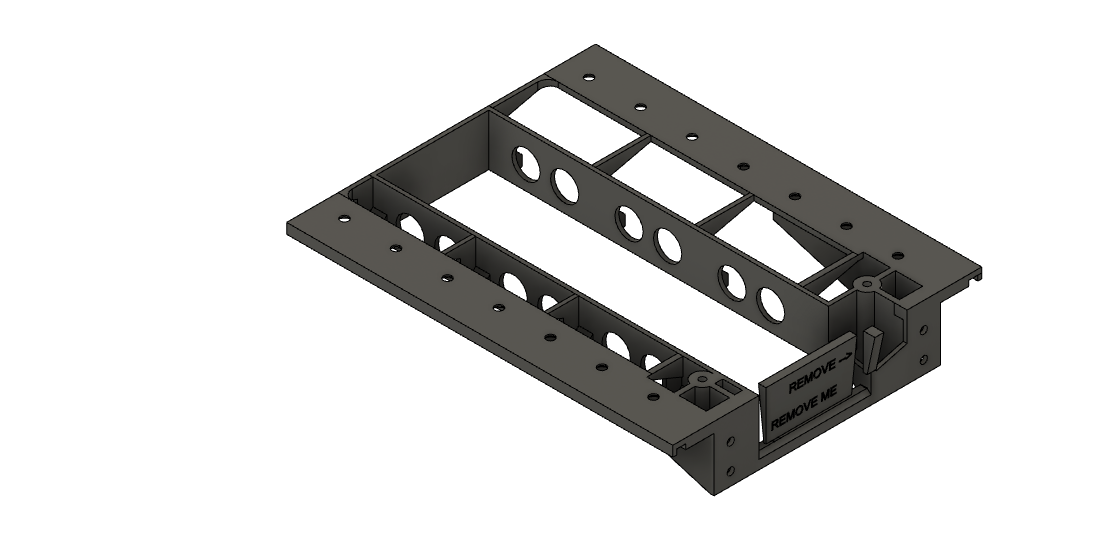
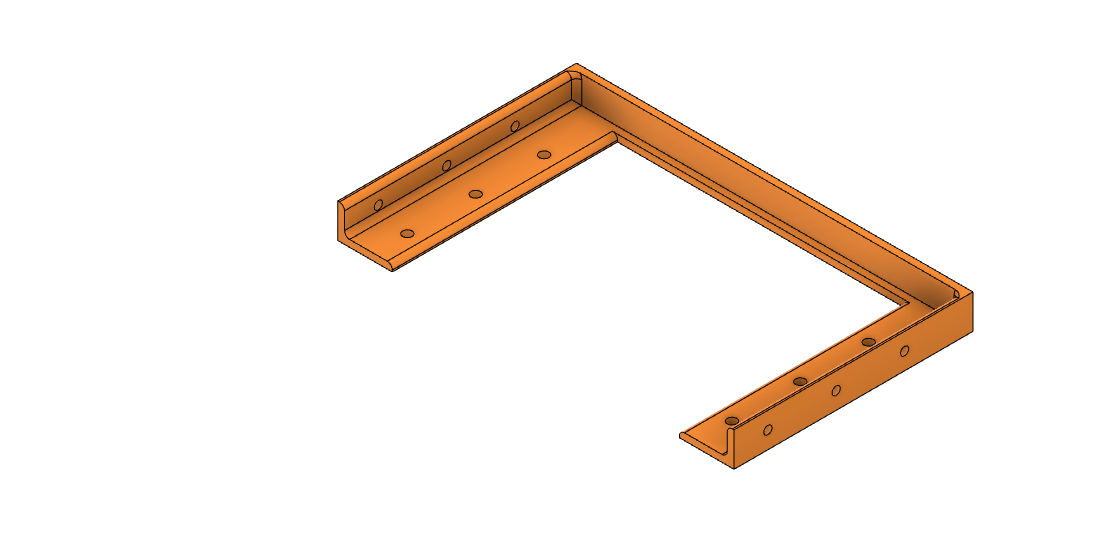
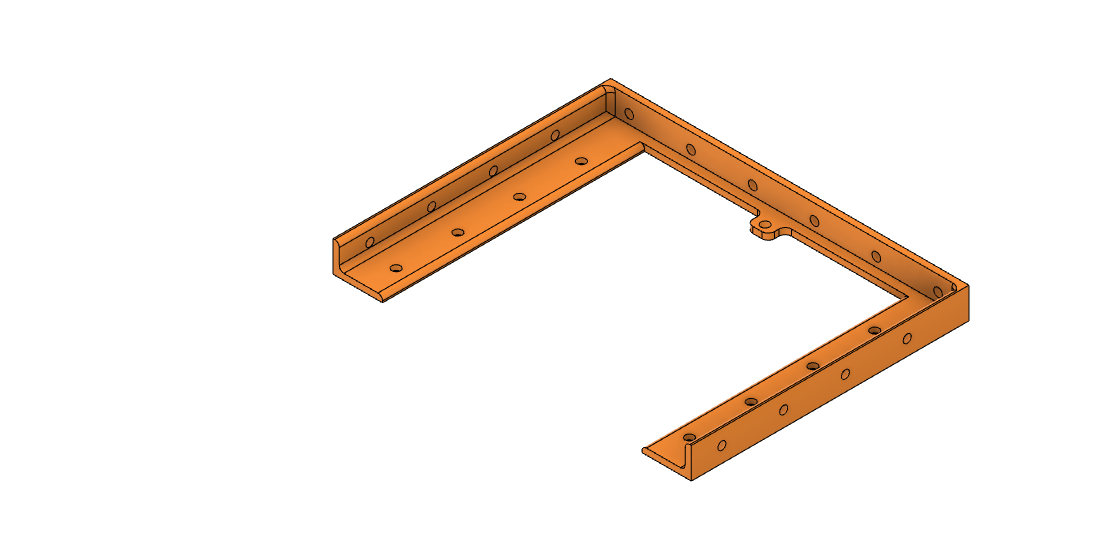
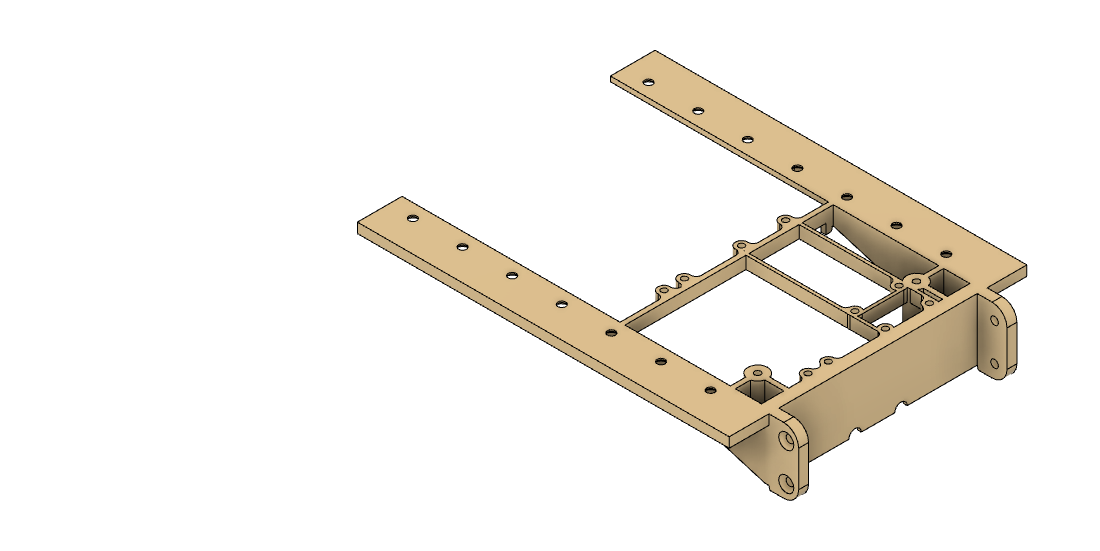
Рама с аккумуляторным отсеком
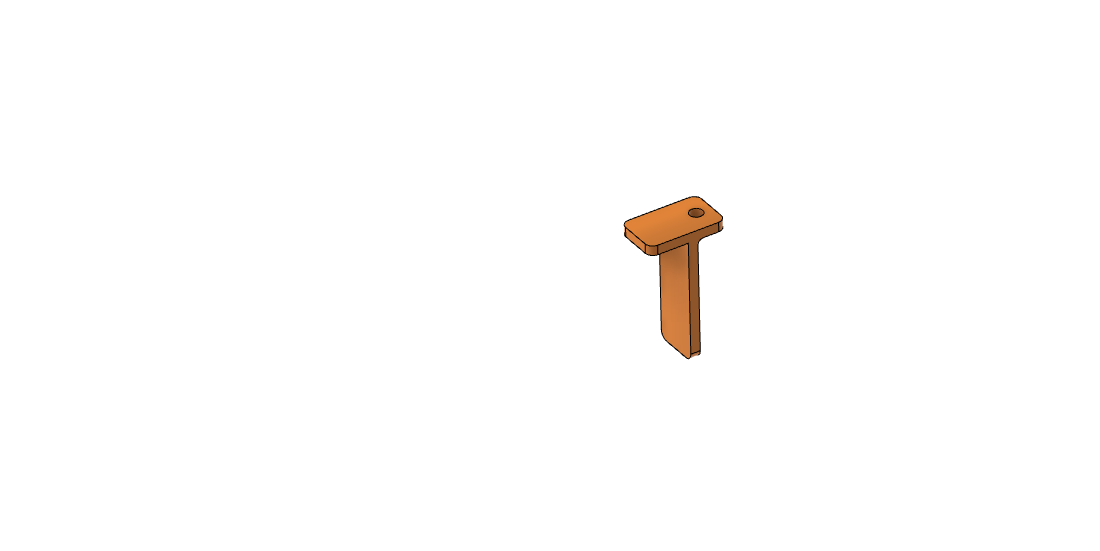
Держатель батареи
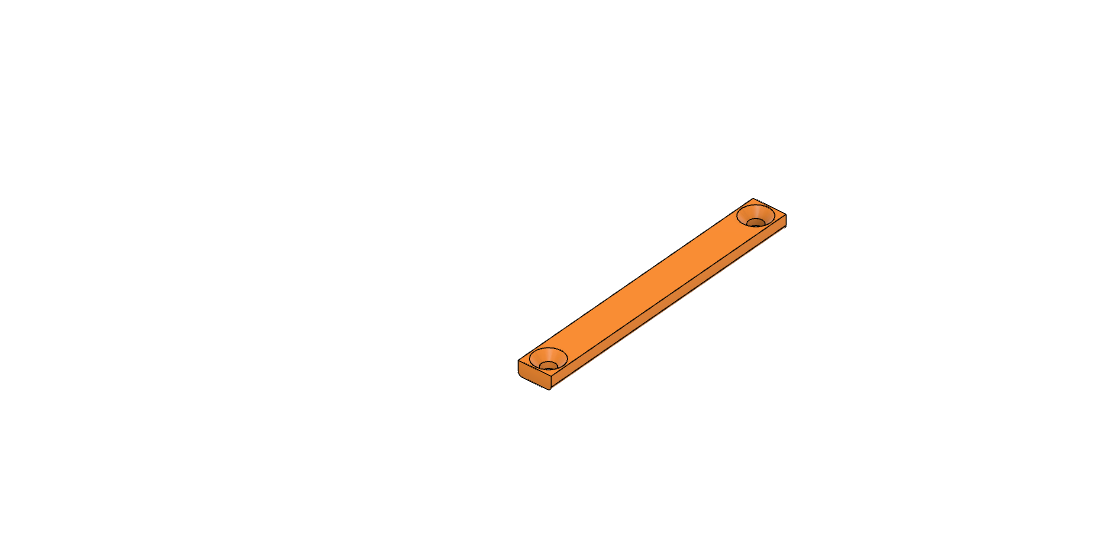
Держатель батареи / сдвижная планка
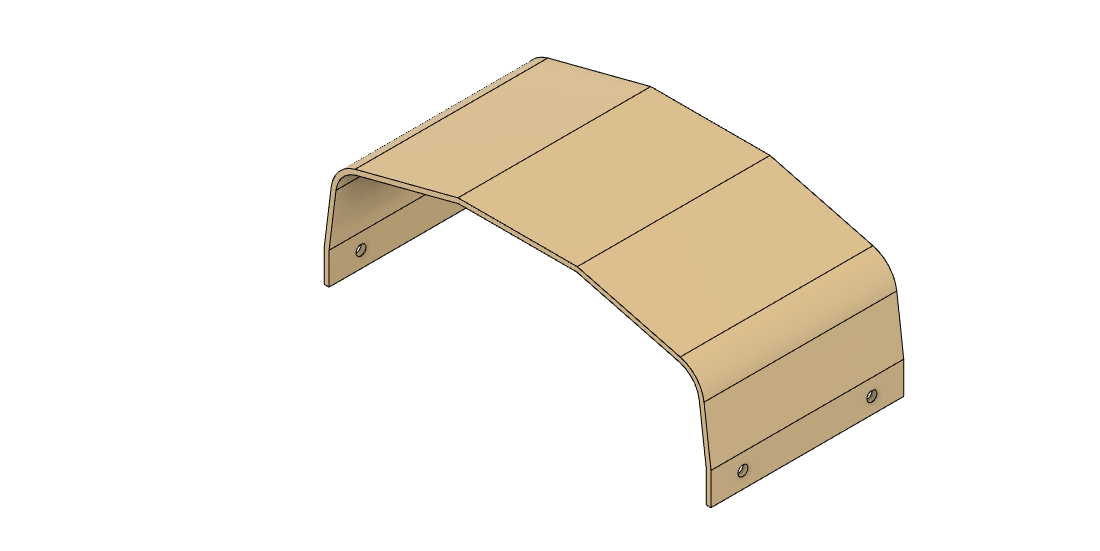
прямая оболочка x 60mm
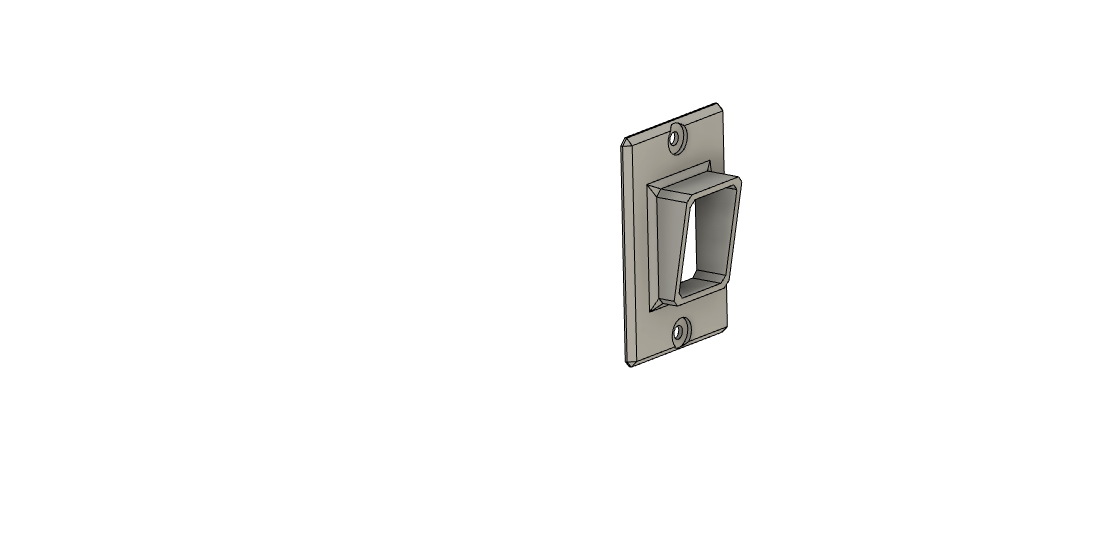
Лицо и бленда камеры
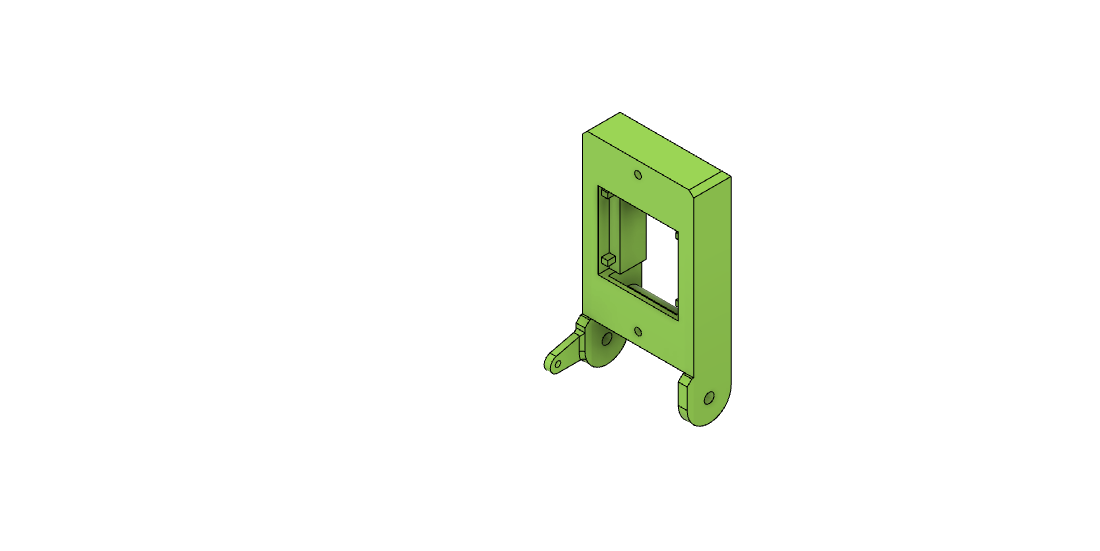
Держатель камеры Rpi
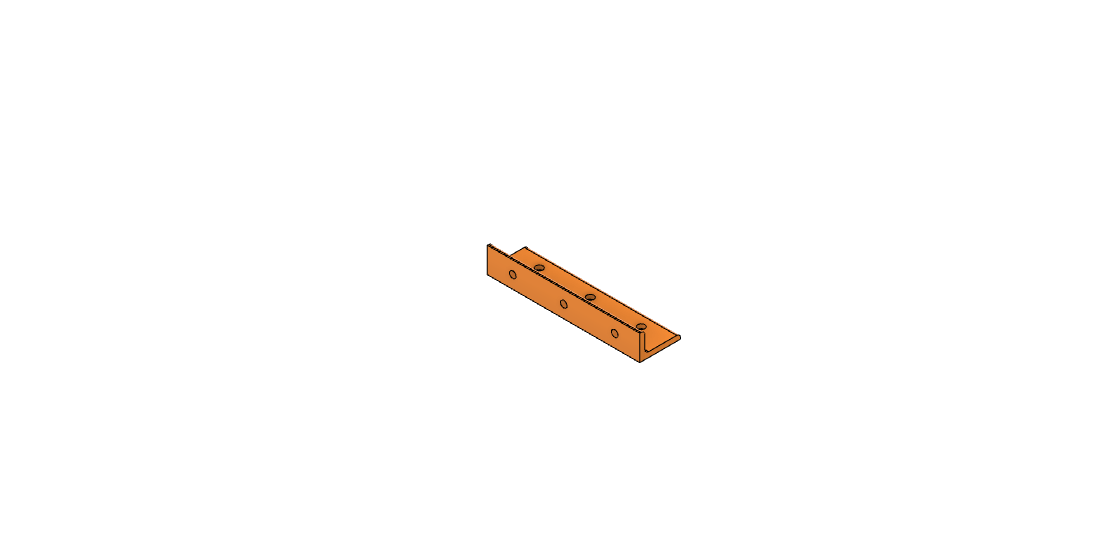
Концевой монтажный угол x 70mm
Концевой монтажный угол x 90mm

Платформа моторной зоны для FeatherWing
Рама для двигателя
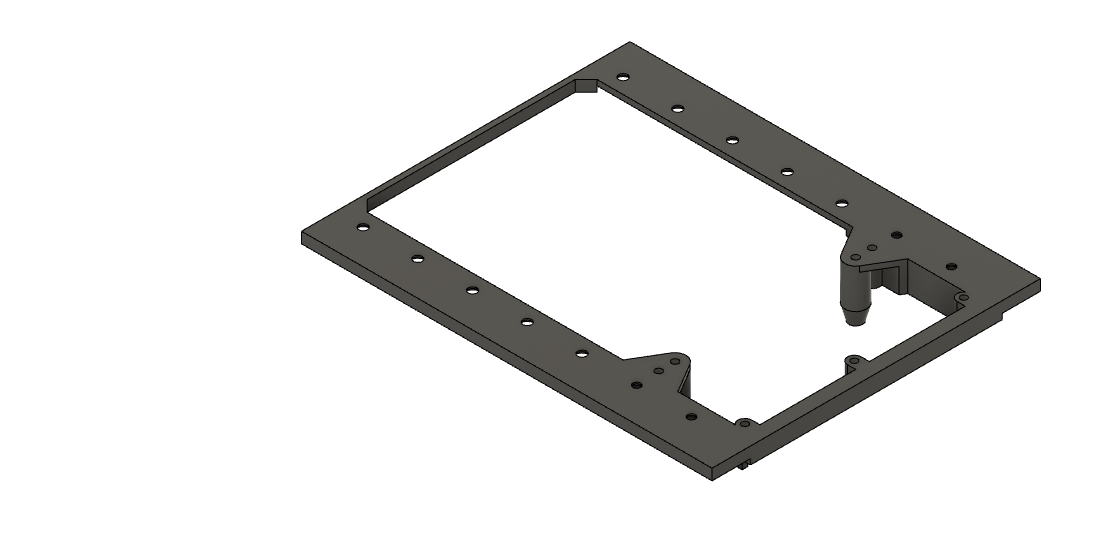
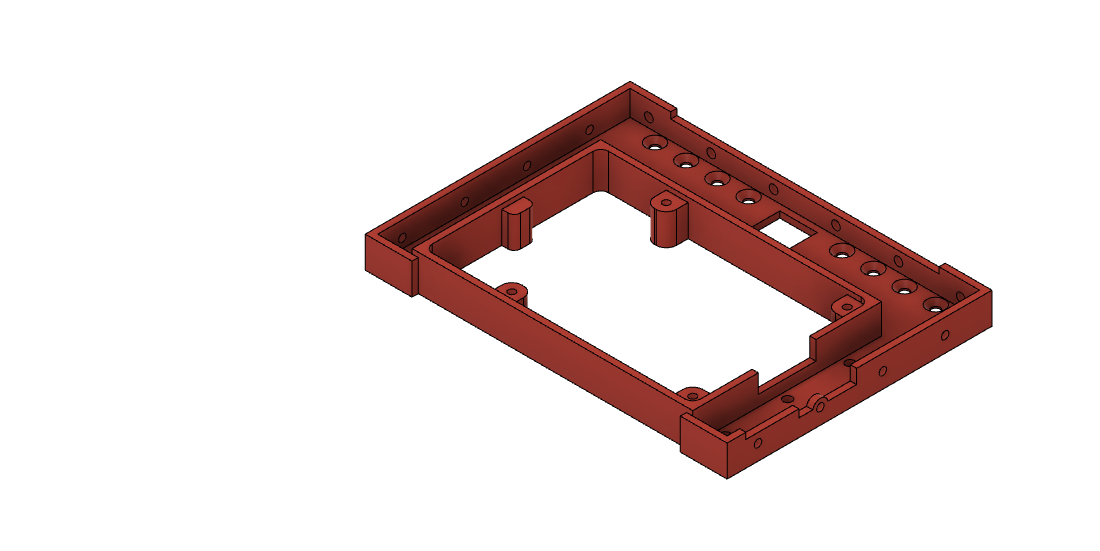
Рамка с универсальными отверстиями для микроконтроллера
Модуль Raspberry Pi A + и B +
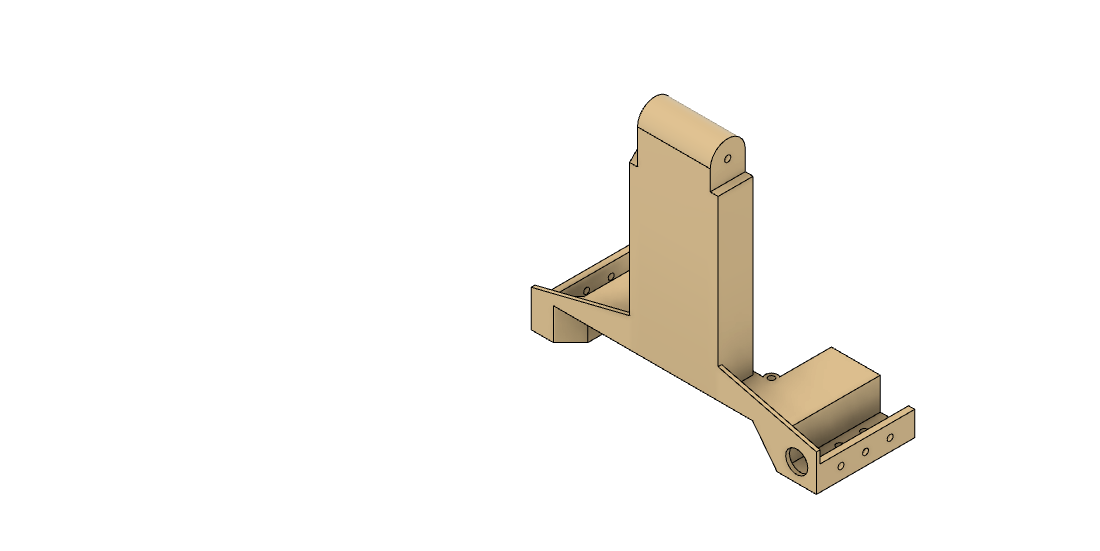
Шейка камеры с сервоприводом S90
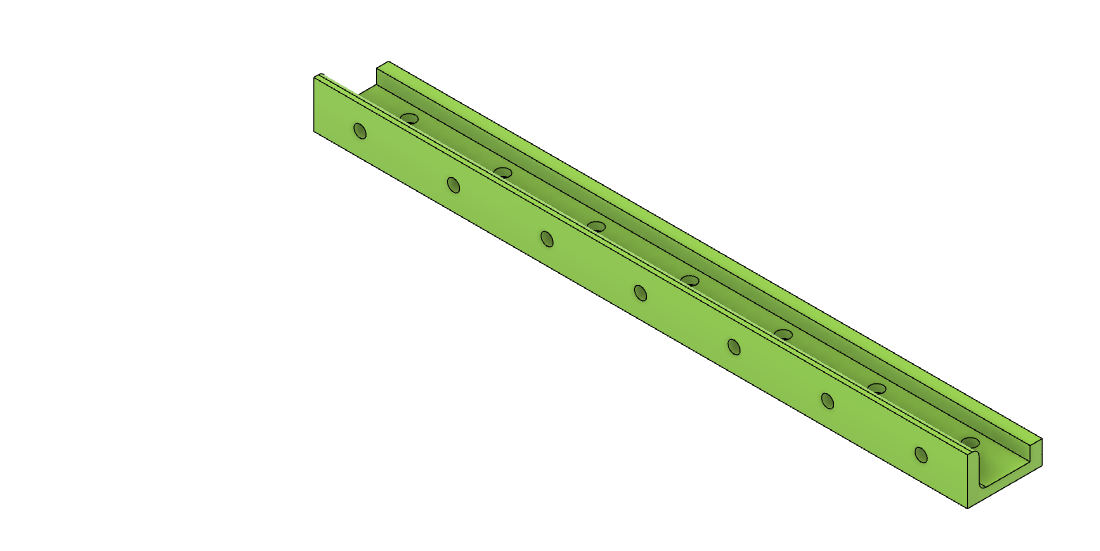
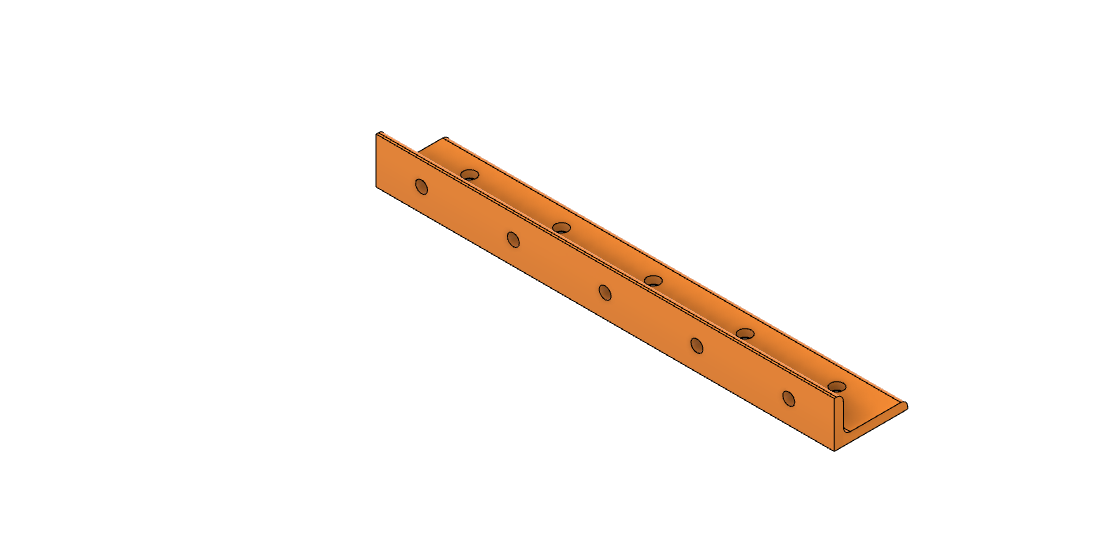
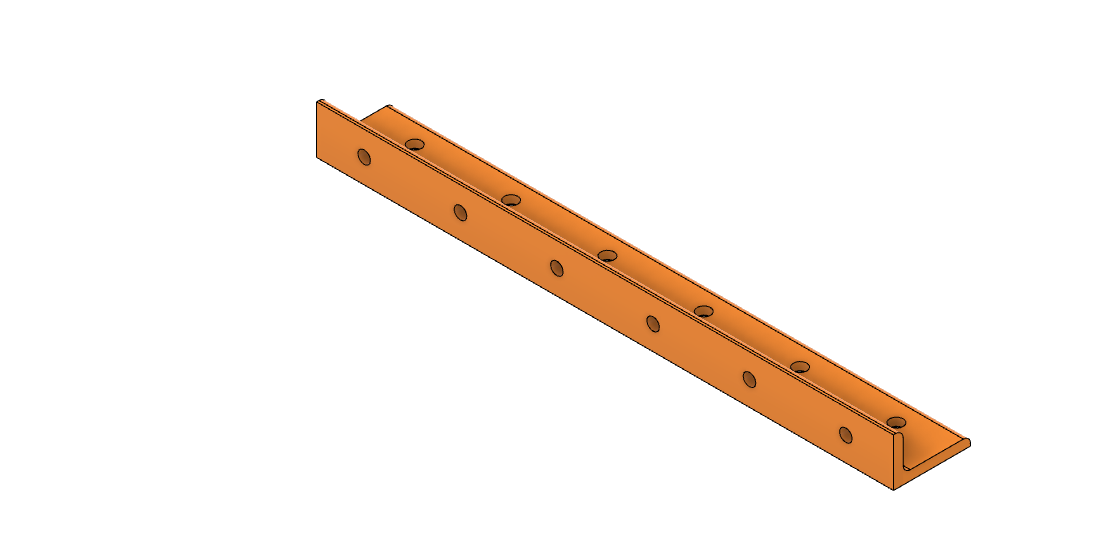
Канал сращивания кадров
Угол установки кузова 60 мм
Угол установки кузова 100 мм
Угол установки кузова 120 мм
Рама с аккумуляторным отсеком
Держатель батареи
Держатель батареи / сдвижная планка
прямая оболочка x 60mm
Лицо и бленда камеры
Держатель камеры Rpi
Концевой монтажный угол x 70mm
Концевой монтажный угол x 90mm
Платформа моторной зоны для FeatherWing
Рама для двигателя
Рамка с универсальными отверстиями для микроконтроллера
Модуль Raspberry Pi A + и B +
Шейка камеры с сервоприводом S90
Канал сращивания кадров
Детали для покупки
- Chassis to Frame Screws ( #4-20 x 1" Rolling Screw for Plastic )
- Frame to Module Screws ( M3-0.50 x 6MM Flat Head Socket Cap Screw )
- SBC Screws ( M2.5x6mm Thread Button Head )
- Body Screws ( #3-24 x 1/4" Rolling Thread Screw for Plastic )
- XT60 Power Inlet
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Amazon
- Tank Chassis at Banggood